

Adaptive under-actuated anthropomorphic hand:
People involved:
- Mahmoud Tavakoli
- Anibal T De Almeida
ISR-Softhand is a novel under-actuated self contained anthropomorphic robotic hand which takes advantage of elastic joints and soft pads. The integrated compliance in the hand’s joint allows for a very good adaptability to a wide range of objects. It can achieve the top ten grasps with highest frequency of usage by humans, with only three actuators.
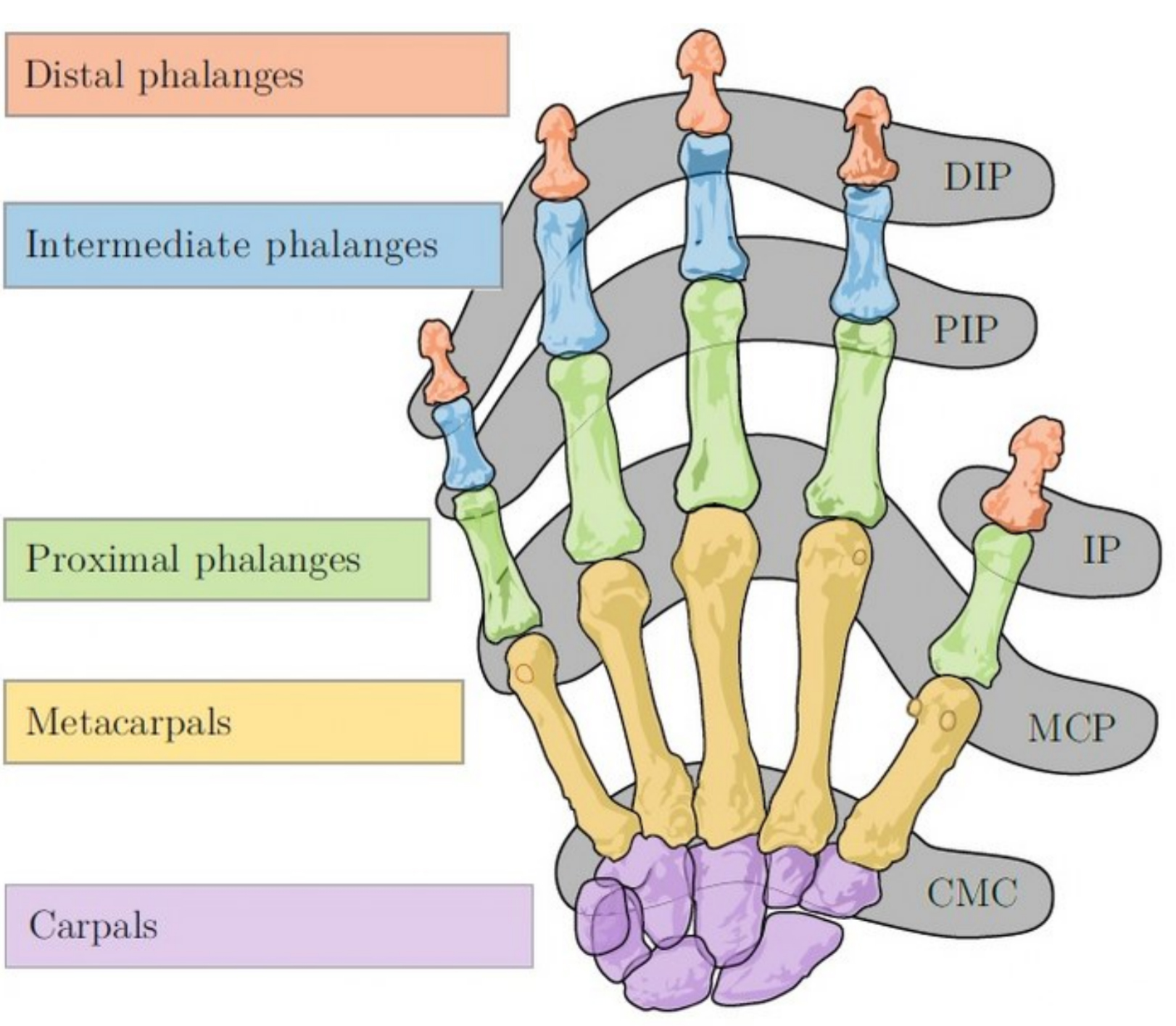
Bones and joints of the human hand, DIP – Distal Interphalangeal joint; PIP – Proximal Interphalangeal joint; IP – Interphalangeal joint; MCP – Metacarpophalangeal joint; CMC – Carpo-Metacarpal joint.
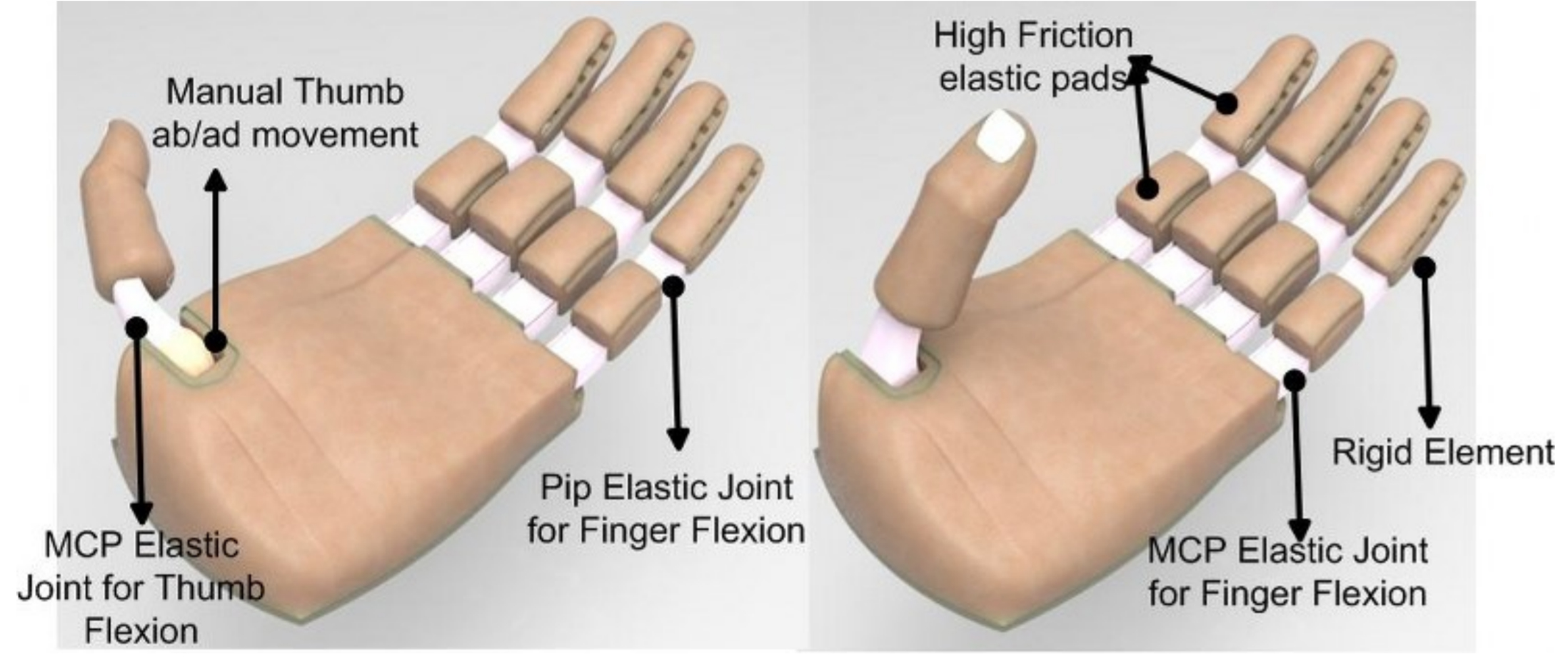
Conceptual design of the Softhand: Each finger is composed of MCP and PIP joints and does not include the DIP joint. The thumb is composed of CMC and MCP joints. Except the non/actuated thumb abduction/adduction joint, all other joints are fabricated with elastic materials.
The three actuators drive flexion of the thumb, flexion of the index and flexion of the remaining 3 fingers. The thumb abduction/adduction is performed manually.

Fabrication method: The 3D printed index finger before casting the Urethane rubber (up), the finger after casting(down).
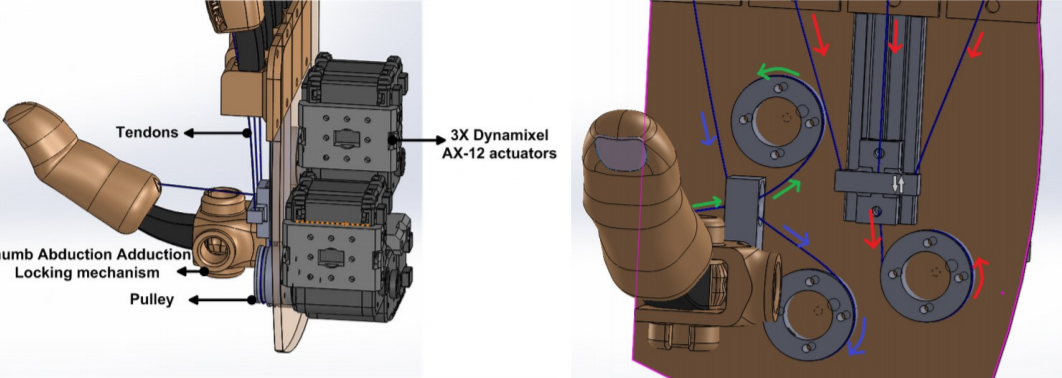
Routing of the tendons for all five fingers.
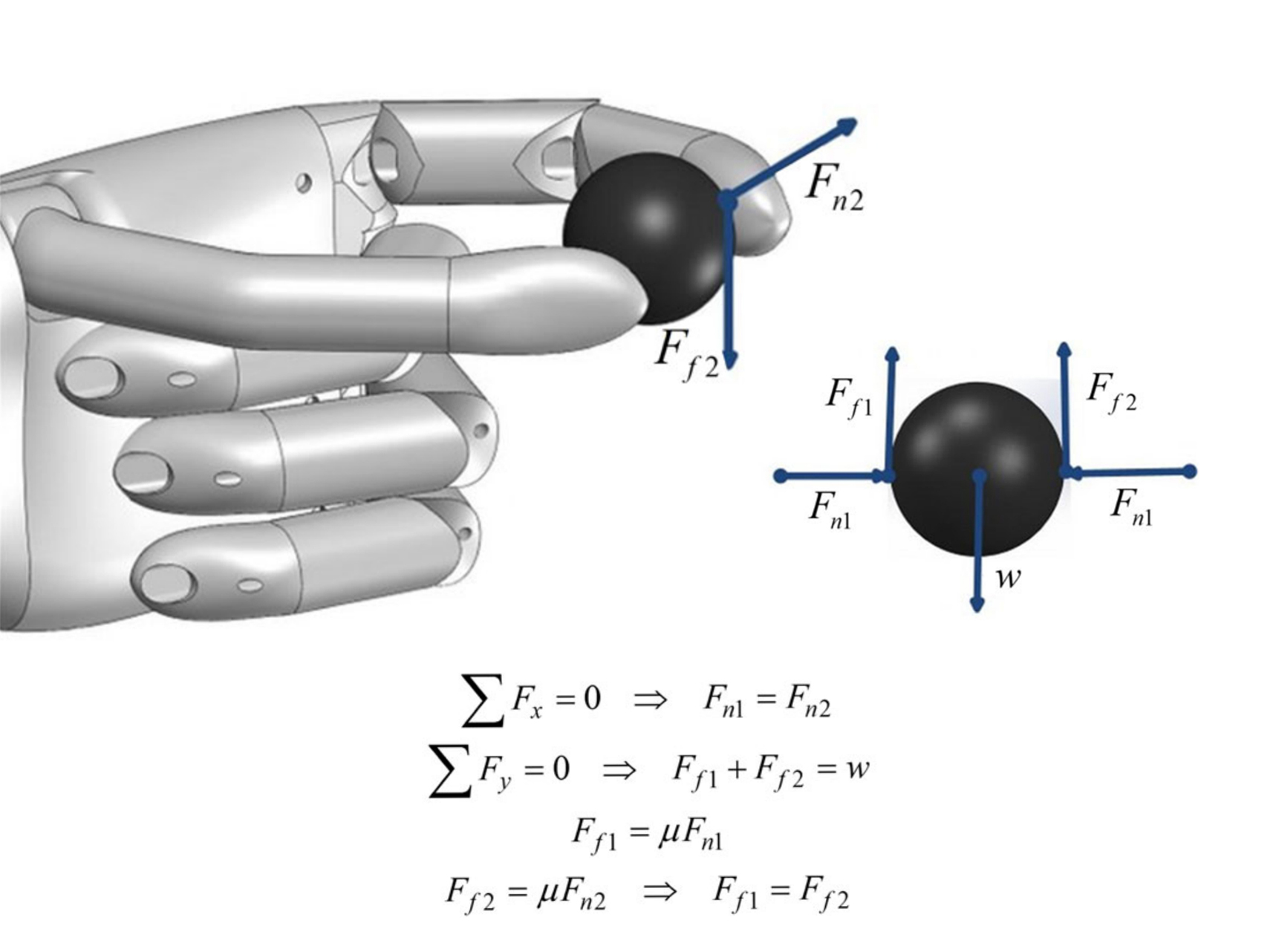
Forces applied to the fingers in a tip pinch.

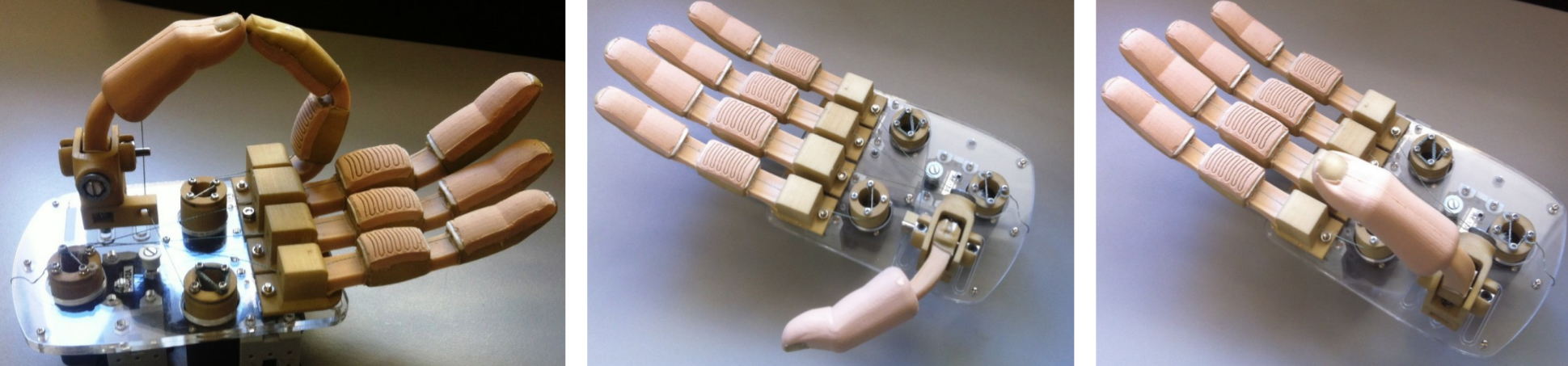
Large diamete, lateral pinch, medium wrap and sphere 3 finger grasps performed by the ISR-Softhand.
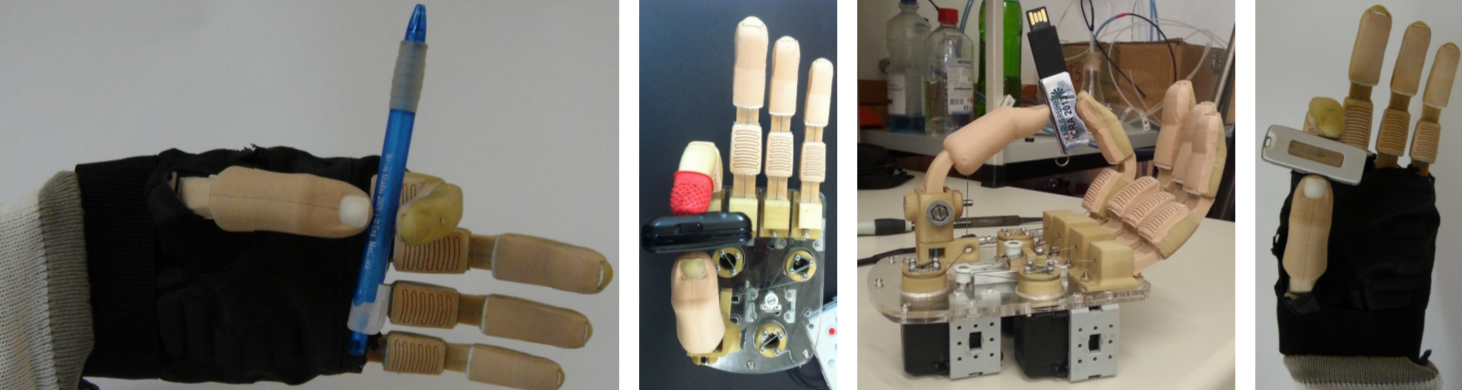
Tip pinch grasp was succesfully performed for grasping several objects.

The initial synergy of the hand which could perform seven out of the top ten grasps, has only an open and a close position.
Adaptive under-actuated anthropomorphic hand: ISR-SoftHand.
M. Tavakoli and A. T. de Almeida, “Adaptive under-actuated anthropomorphic hand: ISR-SoftHand,” 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, 2014, pp. 1629-1634. doi: 10.1109/IROS.2014.6942773