

Bio-inspired climbing robots.
People involved:
- M Tavakoli
- C Viegas

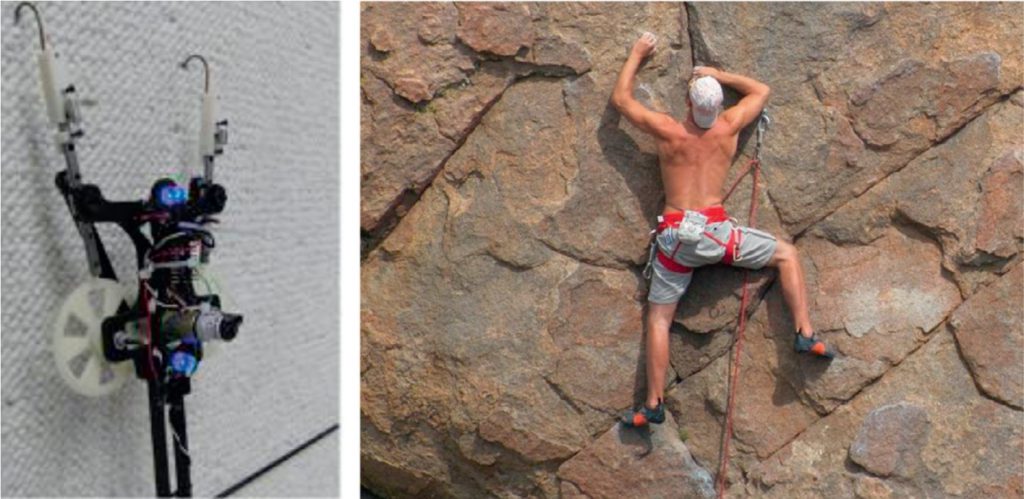
3D Climber robot (on the left), developed at the University of Coimbra, is a step-by-step climbing robot which draws inspiration from the climbing and gripping techniques of primates, shown on the right image. (Image courtesy of Hagit Berkovich.)
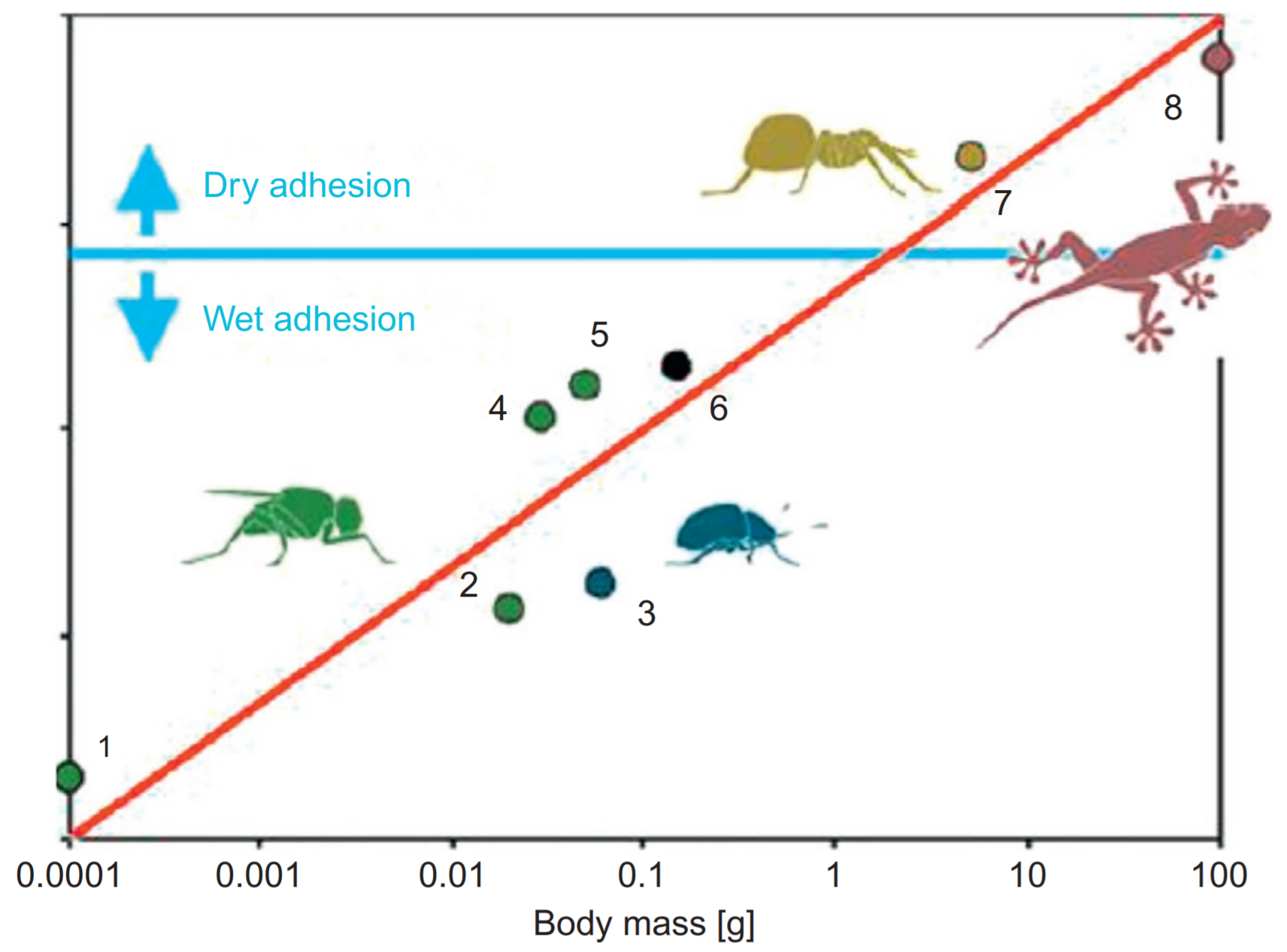
Adhesion mechanism according to body mass, for small animals. 1, 2, 4, 5: flies; 3: beetle; 6: bug; 7: spider; 8: geckonid lizards. Adapted from the book “Attachment Devices of Insect Cuticle” by Gorb (2001) and taken from Gorb et al. (2007) © IOP Publishing. Reproduced by permission of IOP Publishing. All rights reserved. The systems located above the blue line rely on van der Waals forces (dry adhesion), whereas the systems below the line rely mostly on capillary and viscous forces (wet adhesion).

On the left, the WallWalker window cleaning climbing robot. On the right, an example of natural wet adhesion with suction used by limpets (photo courtesy of Jay from Naturebum).
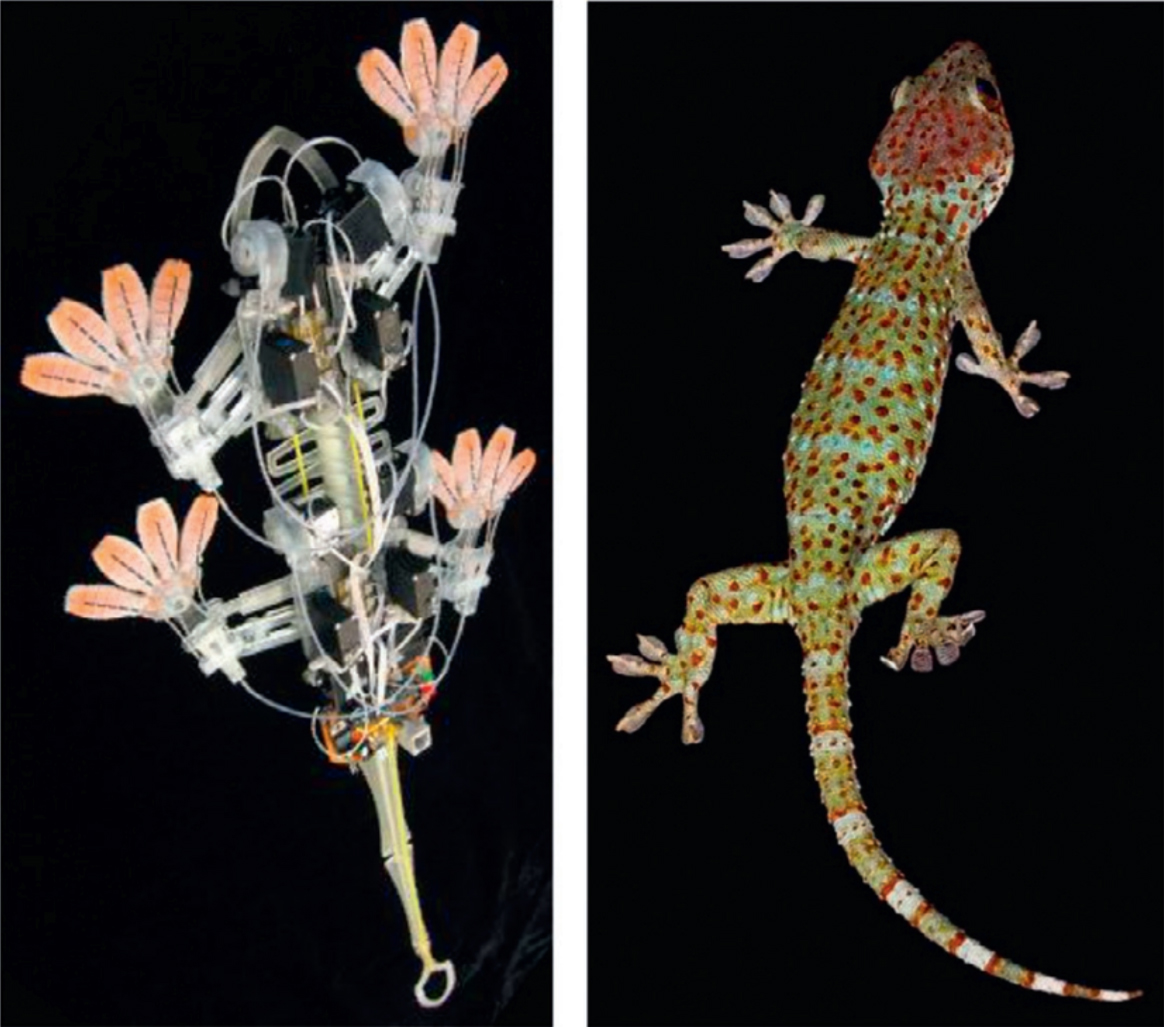
On the left is the StickyBot and on the right is an underside view of a Gecko showing the details of its fingers.

The snail-inspired wall climbing robot uses the same adhesion mechanism as a snail, by releasing a visa glue fluid which acts as glue. (Snail photo by John D.)

On the left, the pruning robot adjusts its posture to stay on the tree using only its weight. The same technique is used for centuries by coconut tree climbers.
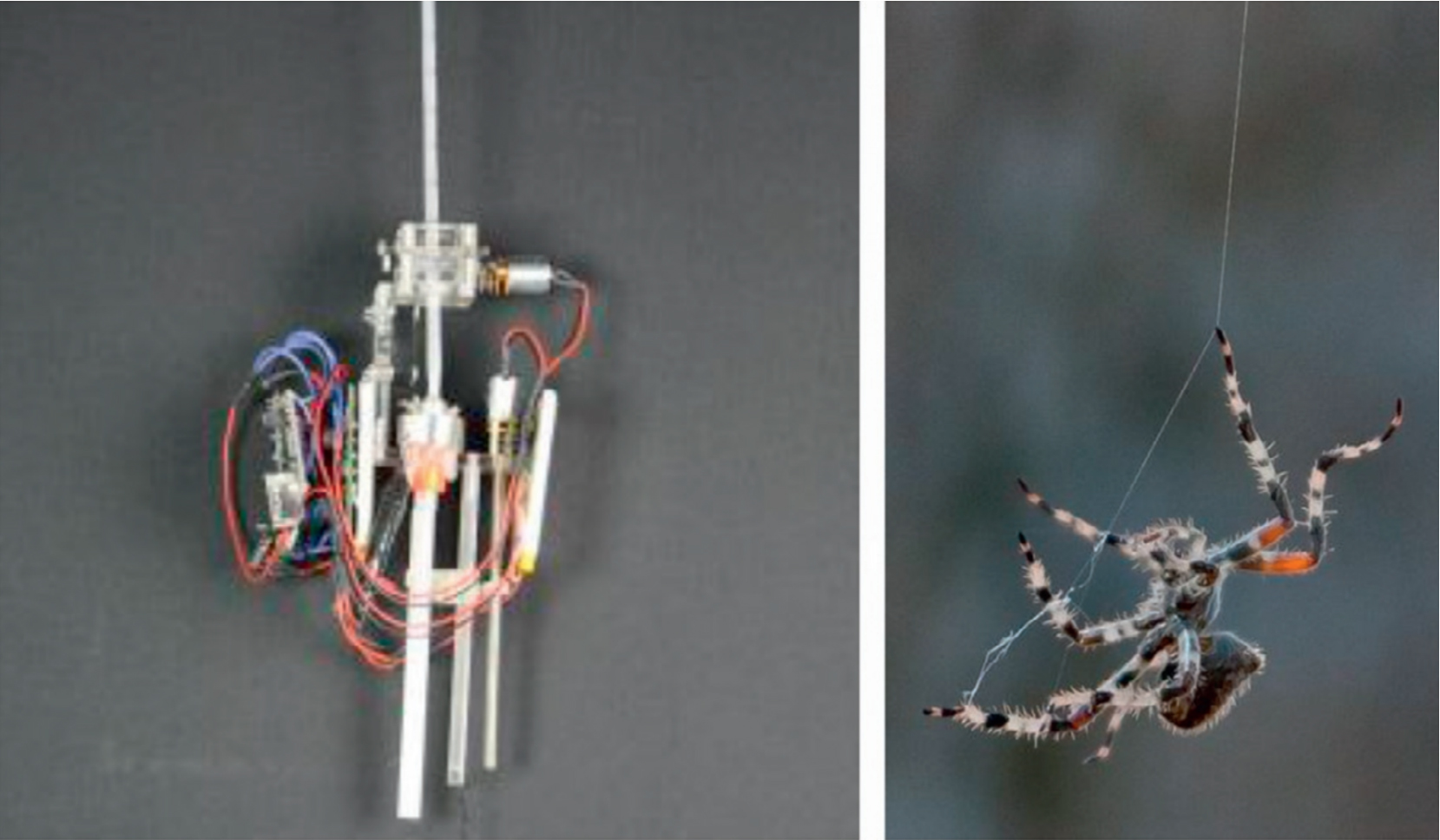
The ETH dragline-forming mobile robot, on the right, draws inspiration from spiders (spider photo credit: Stevie Benintende—www.whatsteviesees.com).

The CMU unified snake robot climbing a tree. This locomotion concept draws inspiration from snakes.
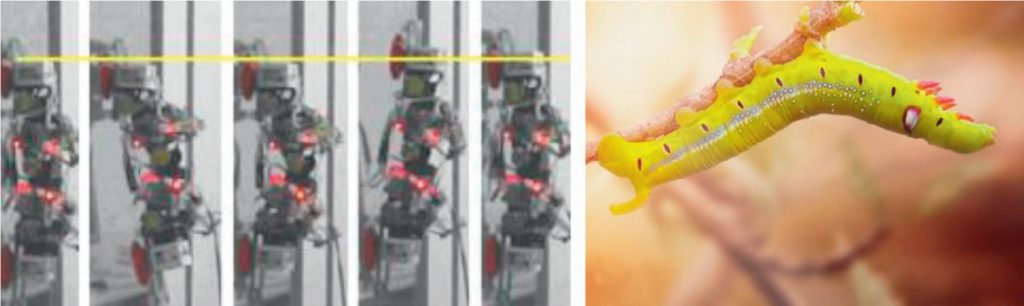
The caterpillar robot by Wei Wang et al., on the left, climbs walls using the crawling principles of caterpillars.
The miniature bipedal dynamic climbing platform, on the left, climbs walls with a single actuator taking advantage of its own internal dynamic motions, similar to the way animals and humans climb vertical walls.
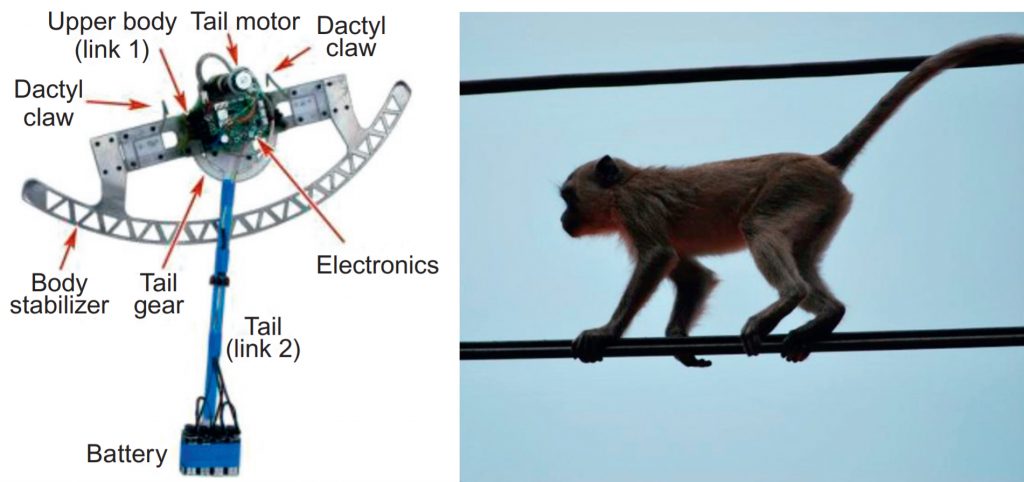
The ROCR robot on the right uses a tail to propel itself upward in a climbing style based on observation of brachiating gibbons.
Bio-inspired climbing robots
M. Tavakoli, C. Viegas (2015), Bio-inspired climbing robots, In Woodhead Publishing Series in Electronic and Optical Materials, Biomimetic Technologies, 301-320, ISBN 9780081002490.