

Hydrogel-Silicone conjunction as epidermal and dermal layers of bio-inspired soft finger skin.

People involved:
- Mahmoud Tavakoli (PI)
- João Guilherme Santos
- João Luis Lourenço
- Anibal T. de Almeida
In this article we present an innovative and bio-inspired design of fingers that resembles the physiology of a biological finger. This includes a 3Dprinted core to substitute the fingers endoskeleton, a silicon elastomer skin to substitute the elastic and resilient epidermal layer and a hydrogel filling to substitute the dermal layer. The dermal layer in human finger is softer than the epidermal layer and contains a considerable amount of water, and therefore should be protected by the more resilient epidermal layer, that not only protects the underlying layer from mechanical wear, but it also provides a barrier against losing the water. On the other hand, the softer dermal layer helps in better local adaptation of the skin to objects for efficient grasping. The silicone epidermal layer is intended to be elastic, malleable and protects the hydrogel from losing water over the time. The hydrogel filling of the finger is made from sodium polyacrylate and distilled water; the material used as the silicone is Ecoflex 00-30. We successfully implemented a low cost and working prototype of the finger that contains hydrogel, adapts well to different objects, and can be pulled by the integrated tendon. We also show the integration of this finger into a prototype of a soft robotic hand.
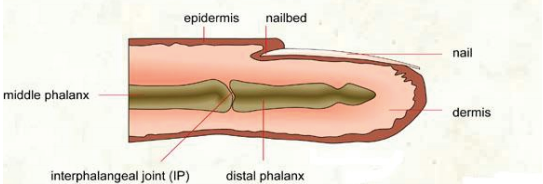
Longitudinal schematic image of a human finger.

Previous version of the finger with a 3D printed endoskeleton and a soft skin. Due to the buckling effect the skin required to have a curve profile cut on the joints.
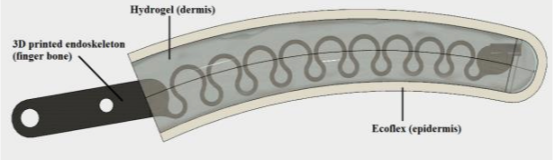
Longitudinal schematic image of the implemented prototype of the soft finger with a rigid 3D printed endoskeleton, a resilient silicone epidermal layer and a soft hydrogel middle dermal layer.
3D Design of finger endoskeleton and the 3D printed part.

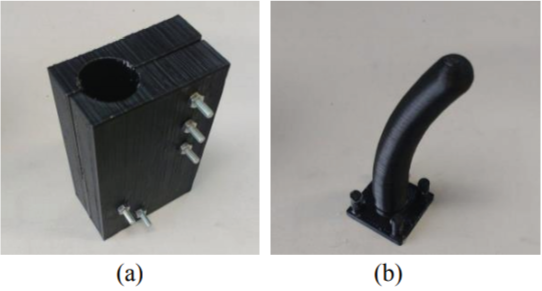
Printed molds for the Ecoflex curing: (a) Main mold; (b) Shaping mold.
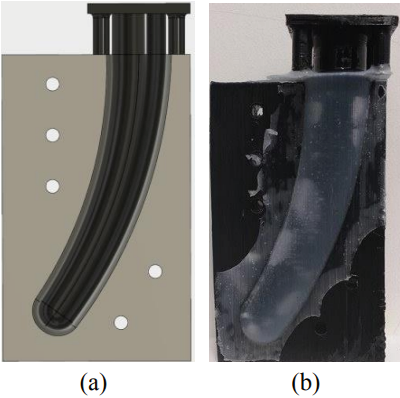
Longitudinal schematic of both molds: (a) 3D design; (b) real picture after curing.
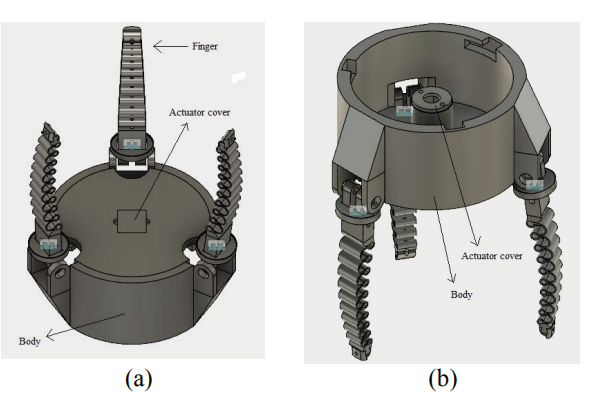
3d design of the first assemble of the under actuated gripper: (a) Top view; (b) Bottom view.
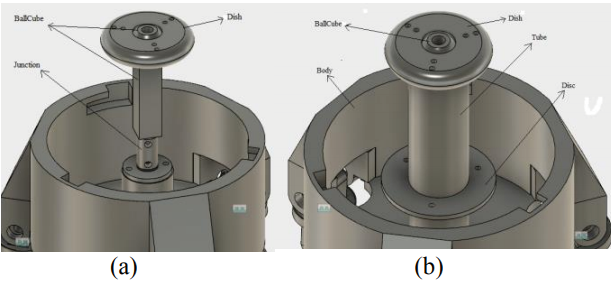
Bottom view of the 3D design of the under actuated gripper: (a) second assemble, (b) third assemble.
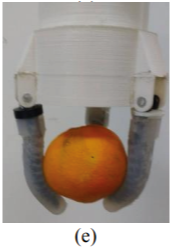
Grasping tests with some objects: (a) Peach with 147,56g; (b) Apple with 151,92g; (c) Ink flask with 126,26g; (d) Cube with 35,62g; (e) Orange with 140,24g; (f) Ball with 14,46g.





Hydrogel-silicone conjunction as epidermal and dermal layers of bio-inspired soft finger skin
M. Tavakoli, J. G. Santos, J. L. Lourenço and A. T. de Almeida, “Hydrogel-silicone conjunction as epidermal and dermal layers of bio-inspired soft finger skin,” 2017 IEEE 5th Portuguese Meeting on Bioengineering (ENBENG), Coimbra, 2017, pp. 1-4. doi: 10.1109/ENBENG.2017.7889471