

Dexterity optimization of a three degrees of freedom delta parallel manipulator.
People involved:
- Vitor Gaspar Silva
- Mahmoud Tavakoli
- Lino Marques
This paper demonstrates dexterity optimization of a Deltalike three degrees of freedom (3 DOF) spatial parallel manipulator. The parallel manipulator consists of three identical chains and is able to move on all three translational axes. In order to optimize the manipulator in term of dexterity, a Genetic Algorithm (GA) global search method was applied. This algorithm aims to propose the best design parameters such as the length of the links which results in a better dexterity. Results of the optimization are presented.
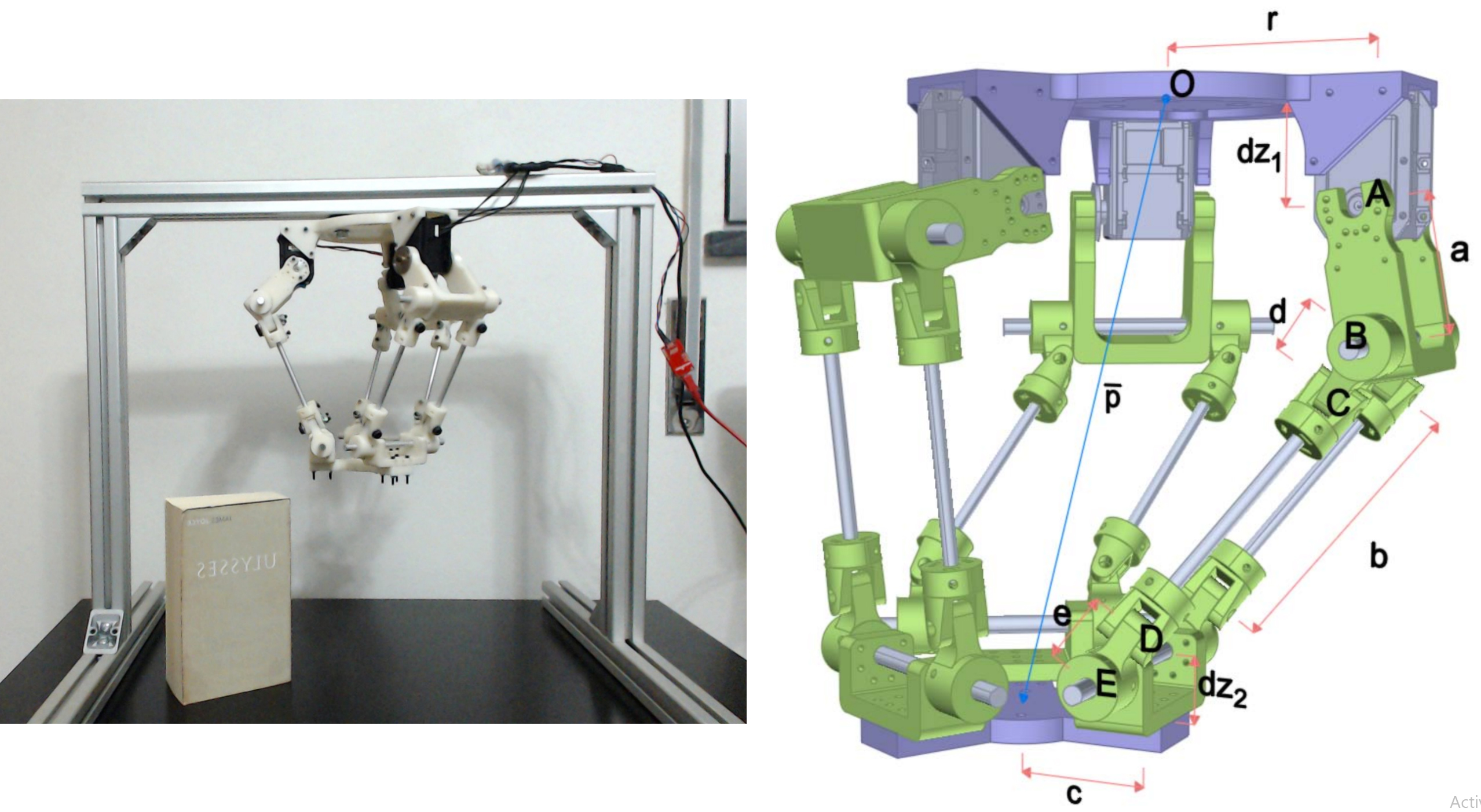
The spatial three degrees of freedom parallel manipulator and schematics of its kinematics chain.
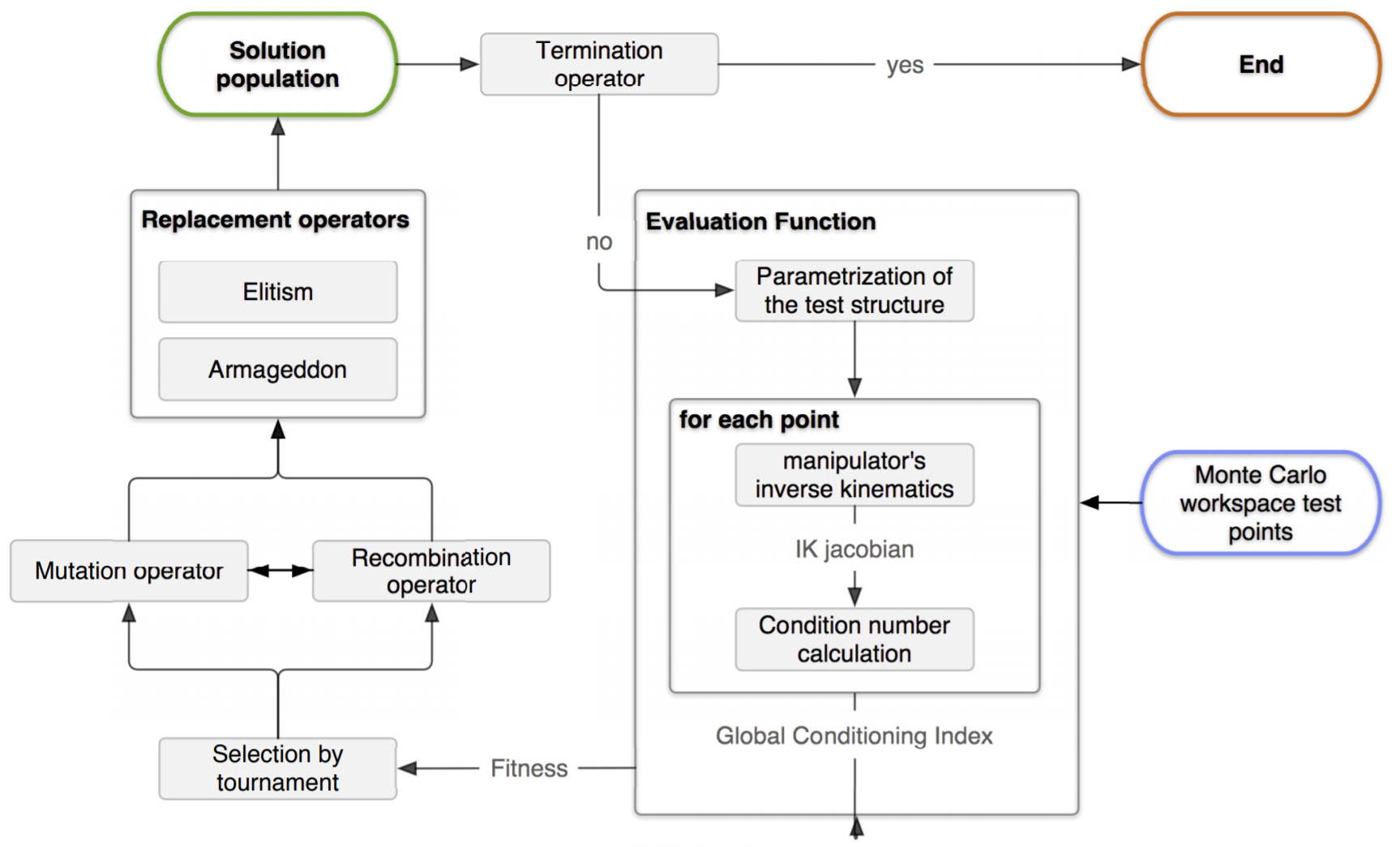
Genetic Algorithm Implementation.
Adaptive under-actuated anthropomorphic hand: ISR-SoftHand.
Silva V.G., Tavakoli M., Marques L. (2014) Dexterity Optimization of a Three Degrees of Freedom DELTA Parallel Manipulator. In: Armada M., Sanfeliu A., Ferre M. (eds) ROBOT2013: First Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 253. Springer, Cham https://doi.org/10.1007/978-3-319-03653-3_51