

Inchworm Climbing Robots.

Cooperative multi-agent mapping of three-dimensional structures for pipeline inspection applications.
Mahmoud Tavakoli, Gonçalo Cabrita, Ricardo Faria, Lino Marques, Anibal T de Almeida
Autonomous mapping for inspection of 3D structures.
M. Tavakoli, R. Faria, L. Marques and A. T. de Almeida, “Autonomous mapping for inspection of 3D structures,” 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, 2011, pp. 4277-4283. doi: 10.1109/IROS.2011.6094494
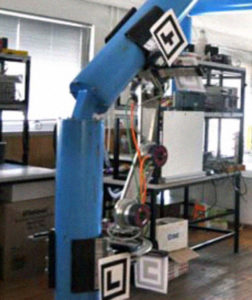

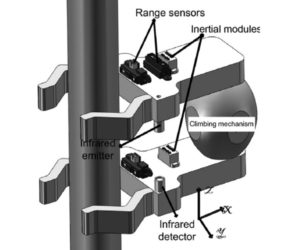
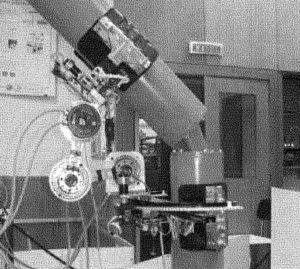
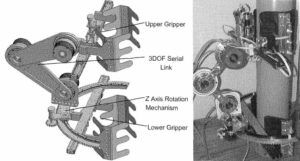
Design, Development, Automation and Control of a Pole Climbing Robot A systematic design approach for development of a climbing robot for inspection of piping in oil and gas industry
Mahmoud Tavakoli
Design, Development, Automation and Control of a Pole Climbing Robot A systematic design approach for development of a climbing robot for inspection of piping in oil and gas industry
Mahmoud Tavakoli

Self calibration of step-by-step based climbing robots.
M. Tavakoli, L. Marques and A. T. Almeida, “Self calibration of step-by-step based climbing robots,” 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, 2009, pp. 3297-3303.
doi: 10.1109/IROS.2009.5354746
A comparison study on Pneumatic Muscles and electrical motors
M. Tavakoli, L. Marques and A. T. de Almeida, “A comparison study on Pneumatic Muscles and electrical motors,” 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, 2009, pp. 1590-1594.
doi: 10.1109/ROBIO.2009.4913238


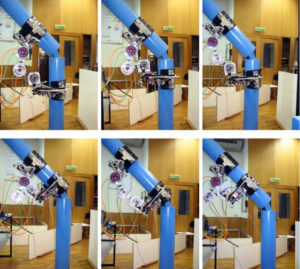
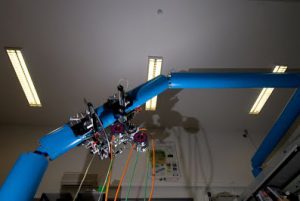
3DCLIMBER: A climbing robot for inspection of 3D human made structures.
M. Tavakoli, A. Marjovi, L. Marques and A. T. de Almeida, “3DCLIMBER: A climbing robot for inspection of 3D human made structures,” 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, 2008, pp. 4130-4135. doi: 10.1109/IROS.2008.4651024
A step toward autonomous pole climbing robots.
Mahmoud Tavakoli, Ali Marjovi, Lino Marques, Aníbal T. de Almeida
A COMPARISON STUDY ON PNEUMATIC MUSCLES AND ELECTRICAL MOTORS USING THE 3DCLIMBER AS A CASE STUDY.
Mahmoud Tavakoli, Lino Marques, Aníbal T. de Almeida
Propose of a benchmark for pole climbing robots.
Tavakoli M., Marques L., de Almeida A.T. (2008) Propose of a Benchmark for Pole Climbing Robots. In: Bruyninckx H., Přeučil L., Kulich M. (eds) European Robotics Symposium 2008. Springer Tracts in Advanced Robotics, vol 44. Springer, Berlin, Heidelberg


A hybrid pole climbing and manipulating robot with minimum DOFs for construction and service applications
Tavakoli, M., Zakerzadeh, M., Vossoughi, G. and Bagheri, S. (2005), “A hybrid pole climbing and manipulating robot with minimum DOFs for construction and service applications”, Industrial Robot, Vol. 32 No. 2, pp. 171-178. https://doi.org/10.1108/01439910510582309