

Toward Fully Printed Soft Actuators: UV-Assisted Printing of Liquid Crystal Elastomers and Biphasic Liquid Metal Conductors
Abstract
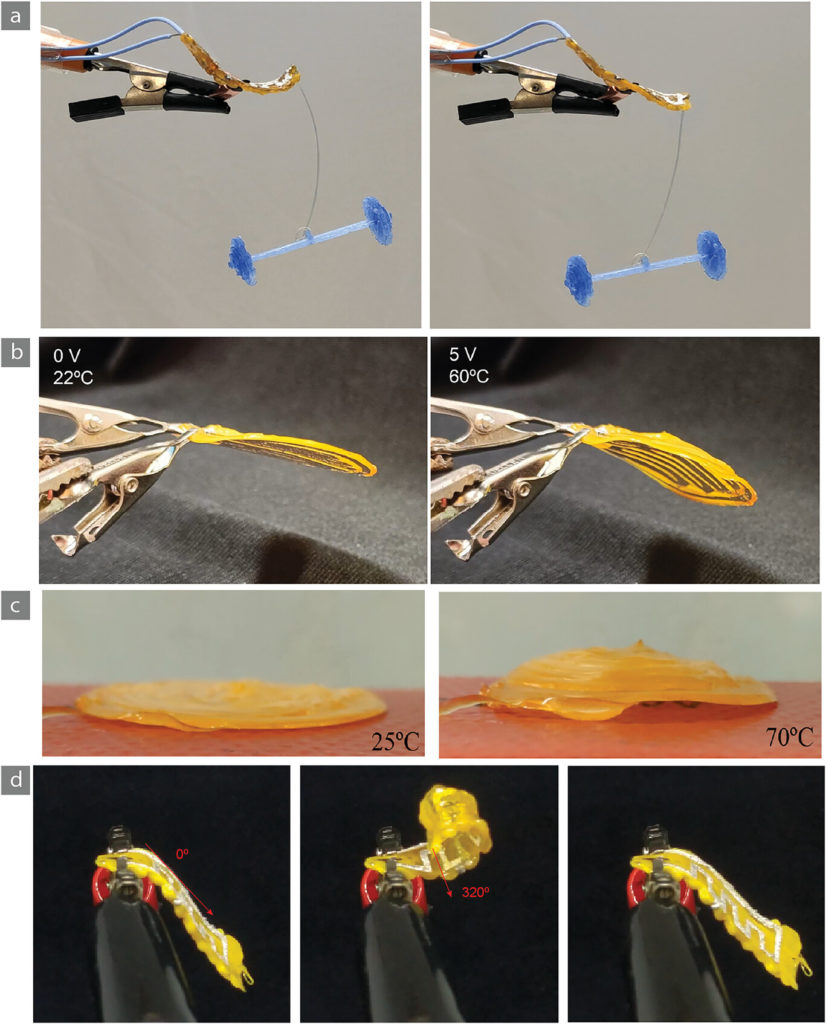
Development of soft and compliant actuators has attracted tremendous attention due to their use in soft robotics, wearables, haptics, and assistive devices. Despite decades of progress, the goal of entirely digitally-printed actuators has yet to be fully demonstrated. Digital printing permits rapid customization of the actuator’s geometry, size, and deformation profile, and is a step toward mass customization of user-specific wearables and soft robotic systems. Herein, a set of materials and methods are demonstrated for rapid fabrication of 3D-printed Liquid Crystal Elastomer actuators electrically stimulated via a printed joule heater composed of a Liquid Metal (LM)-filled elastomer composite. Unlike other Ag-based inks, this LM-elastomer composite is sinter-free, enabling room-temperature printing, and is stretchable, allowing cyclic actuation without electrical or mechanical failure of the conductor. By optimizing printing parameters, and improving the photo-polymerization setup, a printed actuator that bends to an angle of 320° is demonstrated, with lower power consumption than previous LCE actuators. We also demonstrate a customized UV-polymerization setup that permits photo-curing of the LCE actuator in ≈90s, i.e., >500x faster compared to previous works. The rapid photo-polymerization enables progress toward 3D-printing of multi-layer actuators and is a step toward mass customization of fully digitally-printed robotic and wearable devices.
Toward Fully Printed Soft Actuators: UV-Assisted Printing of Liquid Crystal Elastomers and Biphasic Liquid Metal Conductors (2023) PDF
João Sgotti Veiga, Manuel Reis Carneiro, Rafael Molter, Michael Vinciguerra, Lining Yao, Carmel Majidi, Mahmoud Tavakoli
ADVANCED MATERIALS TECHNOLOGIES
DOI: 10.1002/admt.202300144