

Soft bionics hands with a sense of touch through an electronic skin.
People involved:
- Mahmoud Tavakoli
- Rui Pedro Rocha
- João Lourenço
- Tong Lu
- Carmel Majidi
Integration of compliance into the Robotics hands proved to enhance the functionality of under-actuated hands for prosthetic or industrial applications. An appropriate design of the finger geometry with compliant joints allows the fingers to adapt to the shape of the object, and the soft and compliant skin allows for a higher contact area and contact friction. In this article, we describe how these properties were exploited for the development of compliant hands that are simple, efficient and easy to control. We also discuss integration of soft pressure and bending sensors into the digits of these hands.

ISR-Softhand can perform 31 grasps out of the 33 grasps that humans achieve on their daily activities.
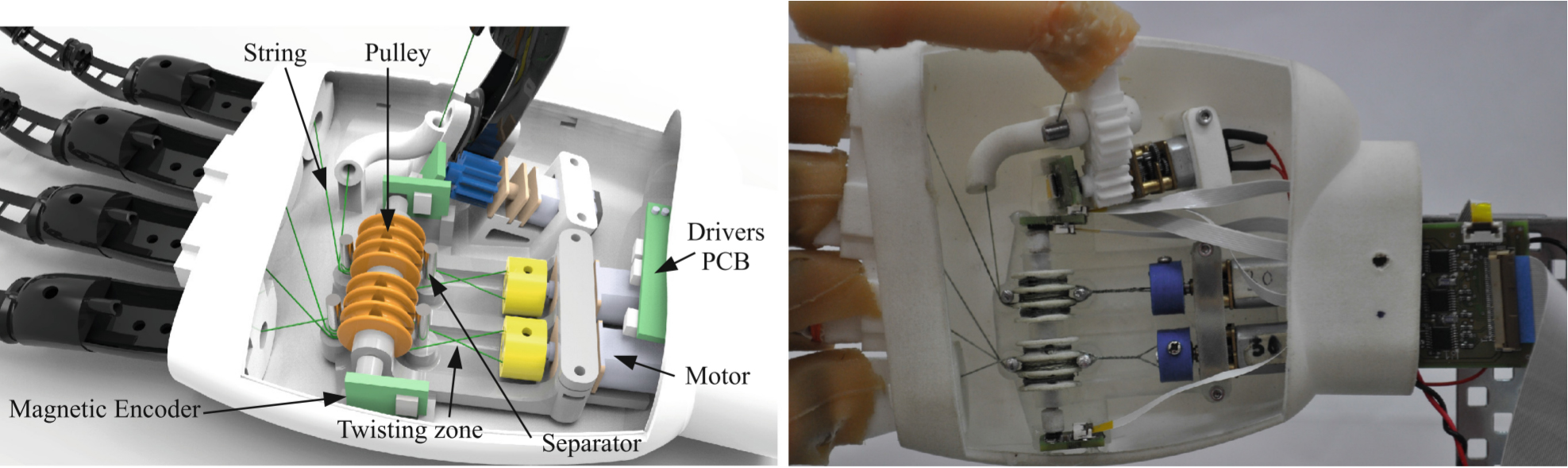
UC-Softhand is composed of a twisted string actuator scheme, making it very low cost, simple and light-weight.

UC-Softhand has an independent actuator dedicated for rotation of the thumb.

Body-actuated hand with soft digits.
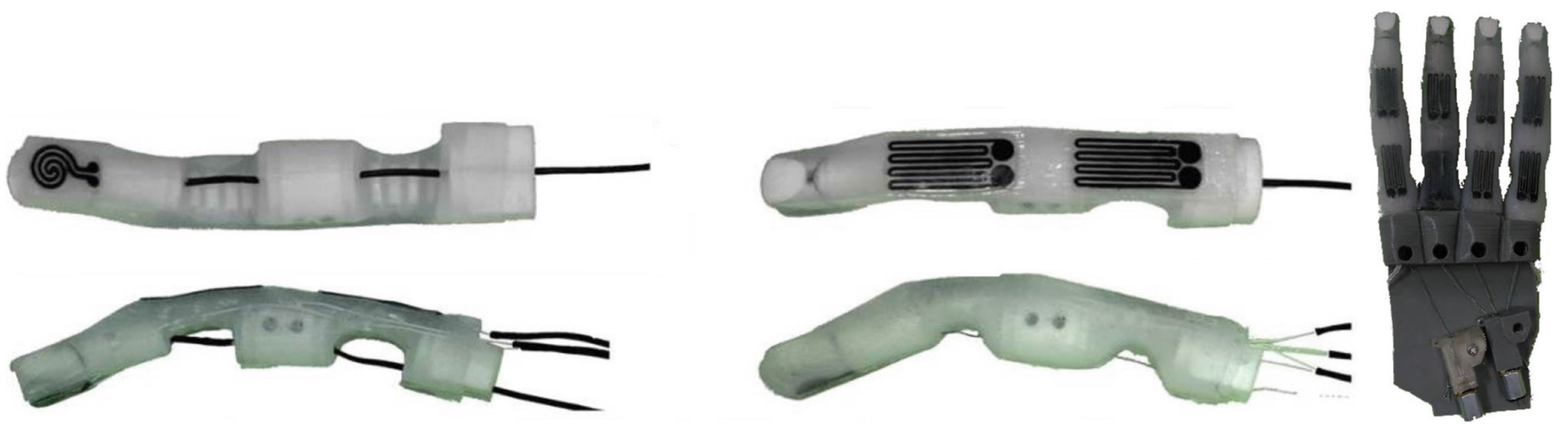
An electronic skin composed of soft pressure sensors and bend sensors are embedded on the digits of soft-hand.
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin.
Tavakoli M., Rocha R.P., Lourenço J., Lu T., Majidi C. (2017) Soft Bionics Hands with a Sense of Touch Through an Electronic Skin. In: Laschi C., Rossiter J., Iida F., Cianchetti M., Margheri L. (eds) Soft Robotics: Trends, Applications and Challenges. Biosystems & Biorobotics, vol 17. Springer, Cham