

Soft-matter sensor for proximity, tactile and pressure detection.
- Rui Rocha
- Pedro Lopes
- Aníbal T. de Almeida
- Mahmoud Tavakoli
- Carmel Majidi
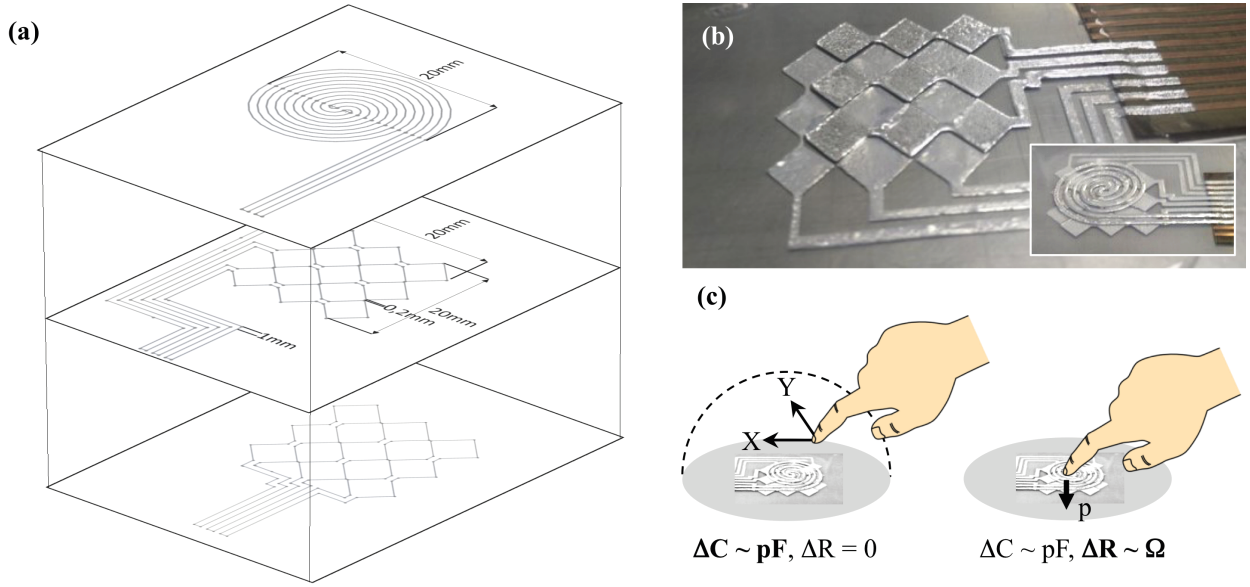
(a) Combined proximity, touch, and pressure sensing is accomplished with multiple layers of patterned liquid metal (LM). (b) Proximity sensor composed of 9 capacitive electrodes arranged in rows and columns; (inset) complete multimodal sensor with capacitive array and resistive pressure transducer. (c) Multimodal sensor is capable of distinguishing between remote finger motion and contact.
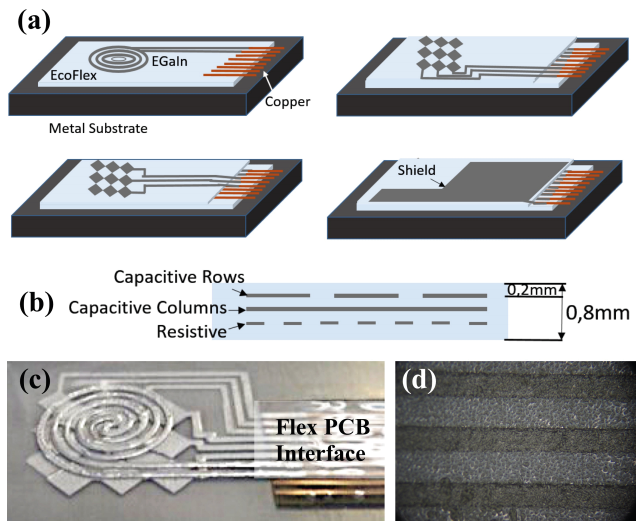
(a) Steps for fabricating multimodal sensor. The sensor is composed of the following four layer of EGaIn that are spray deposited using a stencil: (i) pressure transducer, (ii) top capacitor electrodes, (iii) bottom capacitor electrodes, (iv) electromagnetic shield. (b) Cross-sectional view of sensor layup. The EGaIn terminals of the sensor interface witha flex PCB connector through either (c) direct contact or
(d) a z-axis conductive elastomer composed of verticallyaligned columns of Ag-coated Ni microspheres that is only conductive through its thickness.
Soft-matter sensor for proximity, tactile and pressure detection.
R. Rocha, P. Lopes, A. T. de Almeida, M. Tavakoli and C. Majidi, “Soft-matter sensor for proximity, tactile and pressure detection,” 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, 2017, pp. 3734-3738.
doi: 10.1109/IROS.2017.8206222