

Design and Optimization of Parallel Manipulators with Global search methods
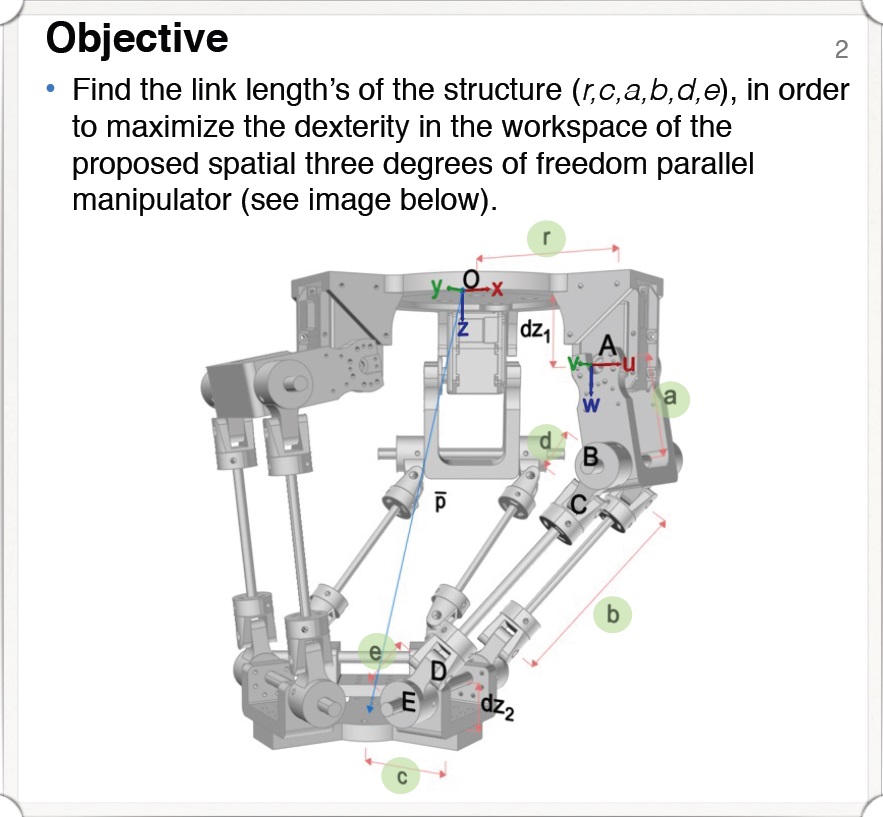
The objective of this project is to design a toolbox which receives a desired work space for a Delta robot and outputs the length of all links in order to achieve the best dynamics and kinematics with a 3 DOF Delta robot.
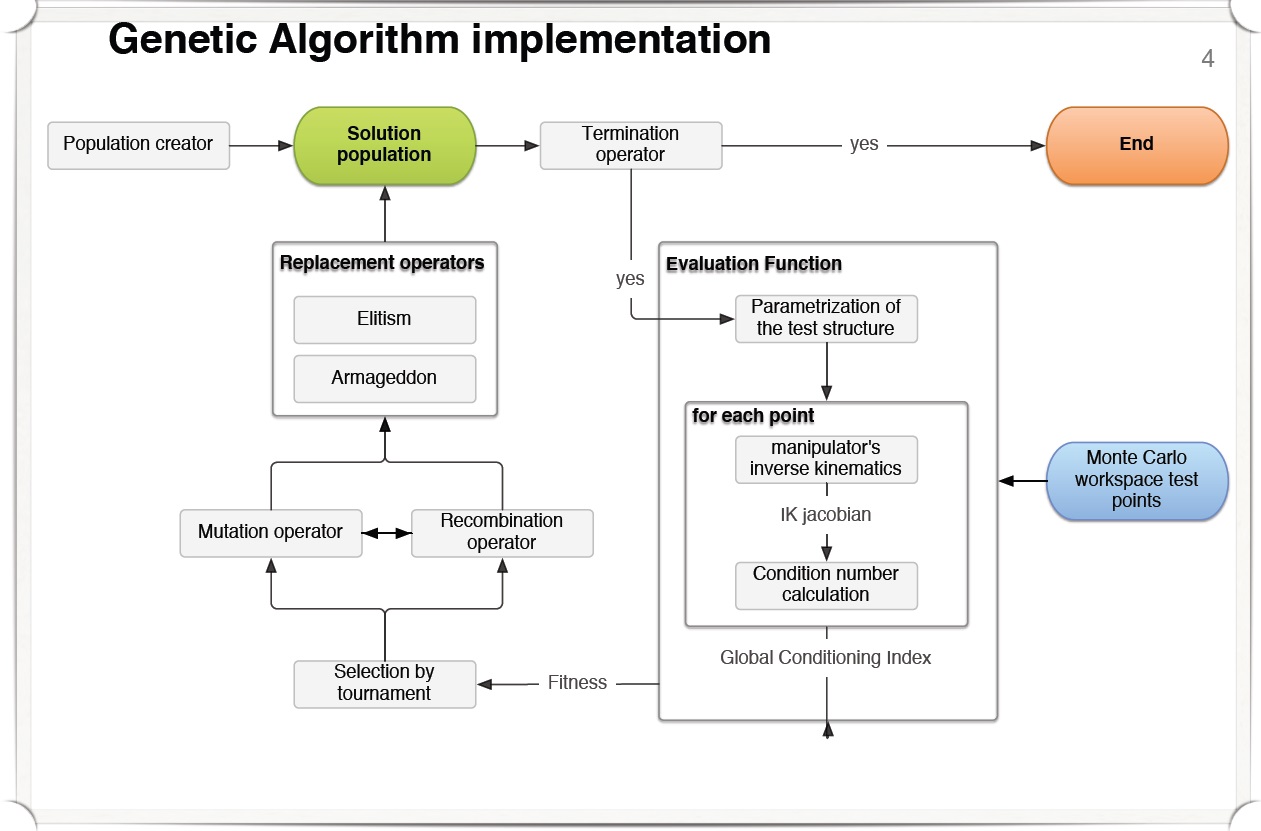
GDI indx, is the well-known index of the parallel robot´s dynamics. While in articulated arms, singularities are located in the borders, this is not the case for parallel robots. Thus when selecting parameters of a Delta robot, for a desired workspace, we need to take care of this issue to avoid internal singularities.
With this toolbox we intend to find the best (minimum) length of the links which guarantees the desired work space, while respecting a minimum desired GDI. To do this we use Genetic Algorithm method.
Selected Publications:
Parallel kinematic machines.
Performance analysis and design of parallel kinematic machines using interval analysis.