

Autonomous Selection of Closing Posture of a Robotic Hand Through Embodied Soft Matter Capacitive Sensor.
People involved:
- Mahmoud Tavakoli
- Pedro Lopes
- Joao Lourenco
- Rui Pedro Rocha
- Luana Giliberto
- Anibal T de Almeida
- Carmel Majidi
Soft matter capacitive sensors are developed and integrated into the silicone skin of finger tips and palm of a robotic hand. Distributed sensing nodes are used for obtaining preliminary pre-touch information about the object that should be grasped. This includes conductive objects taking advantage of proximity sensing from changes in electric field and nonconductive objects taking advantage of pressure sensing from the deforming capacitive electrodes. We argue that this system can eventually address one important challenge in control of multiDOF bionic hands, i.e. autonomously choosing the right closing
pattern. Sensor fabrication, characterization and integration into the hand are described. An algorithm for detection and activation of closing patterns is suggested and results are discussed.
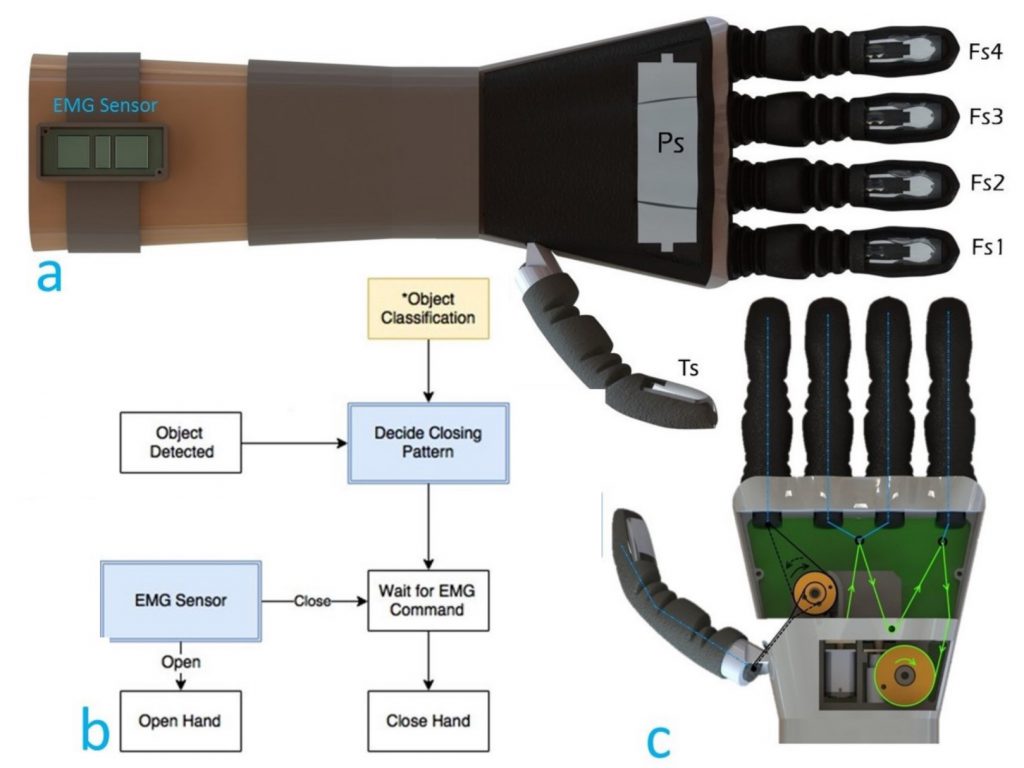
Concept of the proximity based control of the soft hand with distributed capacitive sensors. (a) Schematic of the new version of the soft bionic hand, including 6 stretchable capacitive sensors embedded on all fingers and the palm and an EMG sensor. (b) The novel concept for control of the closing patterns. Based on the object proximity and information from different sensors, the hand decides the closing pattern that shold be performed.Yet the closing and opening is controlled by an EMG sensor by the user for safety reasons. (c) This version of the hand includes only two DC motors, one for flexion of the thumb and index finger and one for the other 3 fingers. The thumb ab/ad is manual.

a) A first layer of PDMS is deposited and cured on a glass substrate. b) Then, the Carbon doped PDMS (cPDMS) is deposited over the PDMS using a stencil. c) The cPDMS is covered with PDMS d) the process is repeated to build the second plate of the parallel plate capacitor. e) Shows a top and lateral image of the fingertip sensor and its dimensions. f) Sensor is placed over the endoskeleton with a first layer of EcoFlex. g) A second layer of EcoFlex is casted in a mould to cover the sensor. h) Shows the final image of the finger, with the sensor integrated on the fingertip
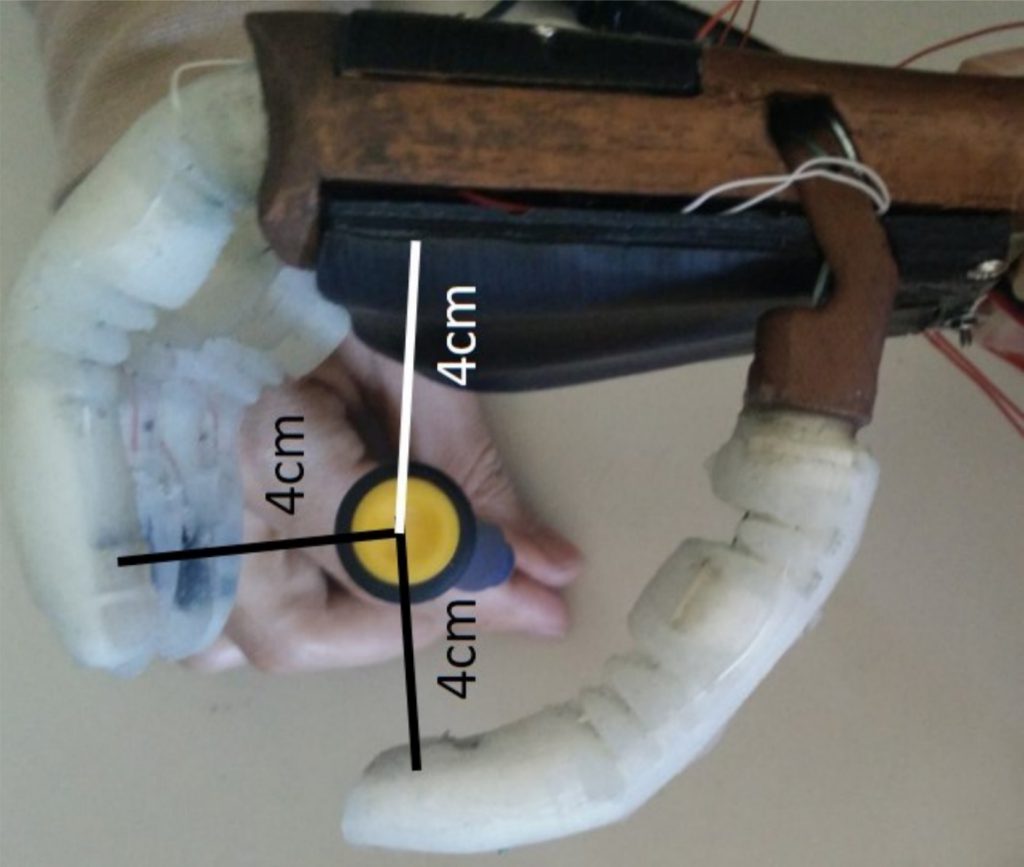
A maximum distance of 4 cm is necessary for detection of proximity of conductive objects when placed inside the hand.
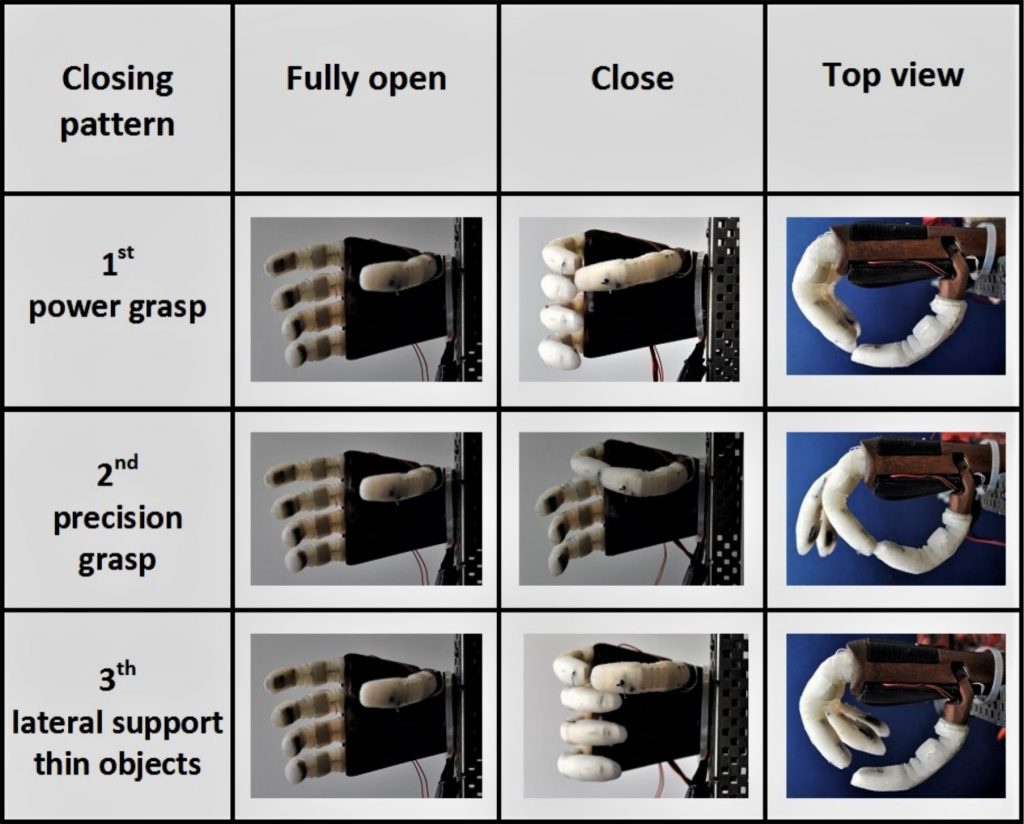
Three closing Patterns of the Soft-Bionic hand.

a) to f) – Placement of conductive and non conductive objects to trigger the appropriate closing pattern, that are respectively shown in figures g) to l). g) and j) represent the Power Grasp, h) and k) the Precision Grasp and i) and l) the Intermediate Grasp. With conductive objects [a) to c)] the closing pattern is proximity-activated while with non-conductive objects [d) to f)] the closing patter in activated by pressure

Autonomous Selection of Closing Posture of a Robotic Hand Through Embodied Soft Matter Capacitive Sensors
M. Tavakoli et al., “Autonomous Selection of Closing Posture of a Robotic Hand Through Embodied Soft Matter Capacitive Sensors,” in IEEE Sensors Journal, vol. 17, no. 17, pp. 5669-5677, 1 Sept.1, 2017.
doi: 10.1109/JSEN.2017.2726348