

The UC softhand:
People involved:
- Mahmoud Tavakoli
- Rafael Batista
- Lucio Sgrigna
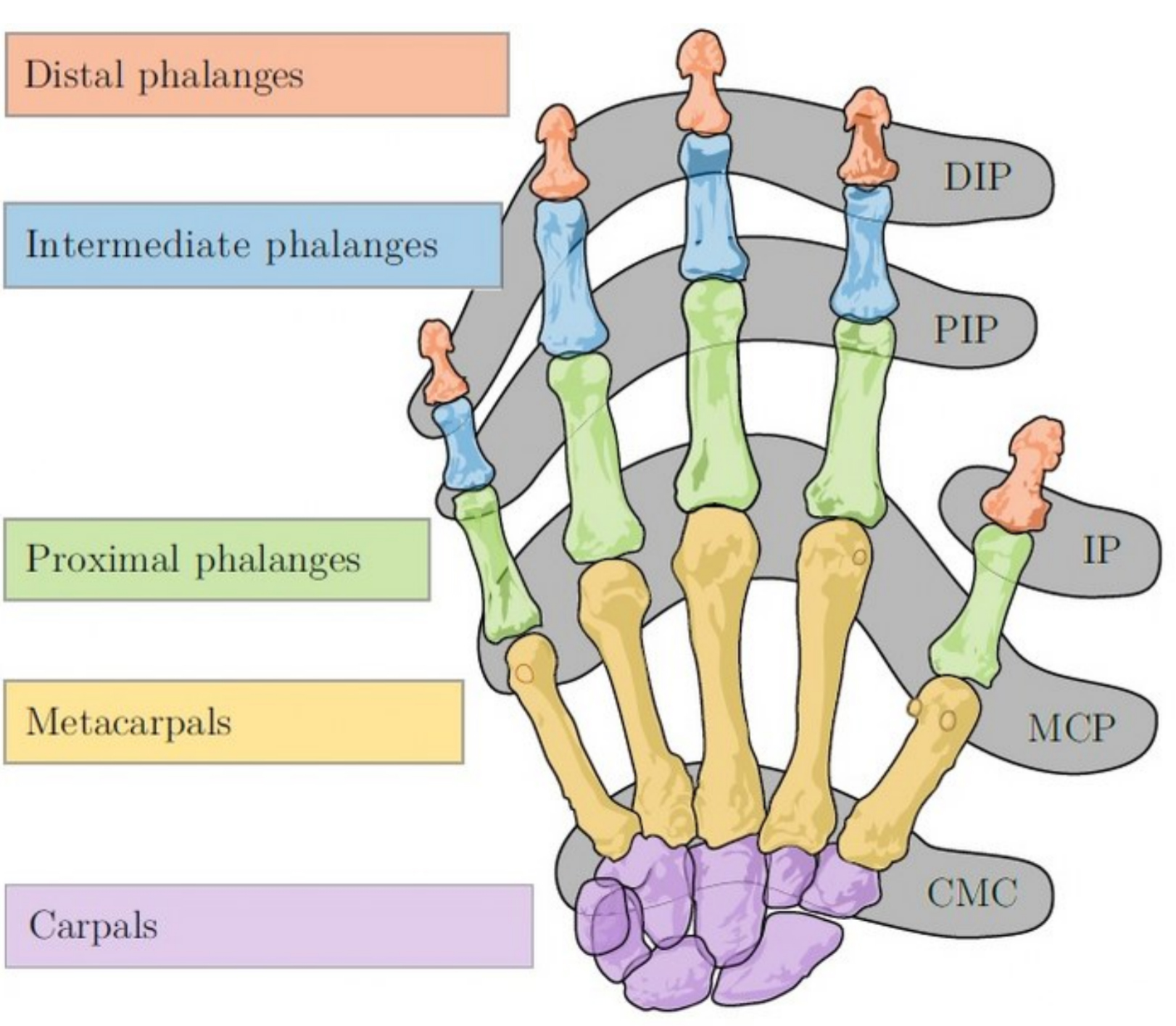
Bones and joints of the human hand, DIP—Distal Interphalangeal joint; PIP—Proximal Interphalangeal joint; IP—Interphalangeal joint; MCP—Metacarpophalangeal joint; CMC—Carpo-Metacarpal joint.
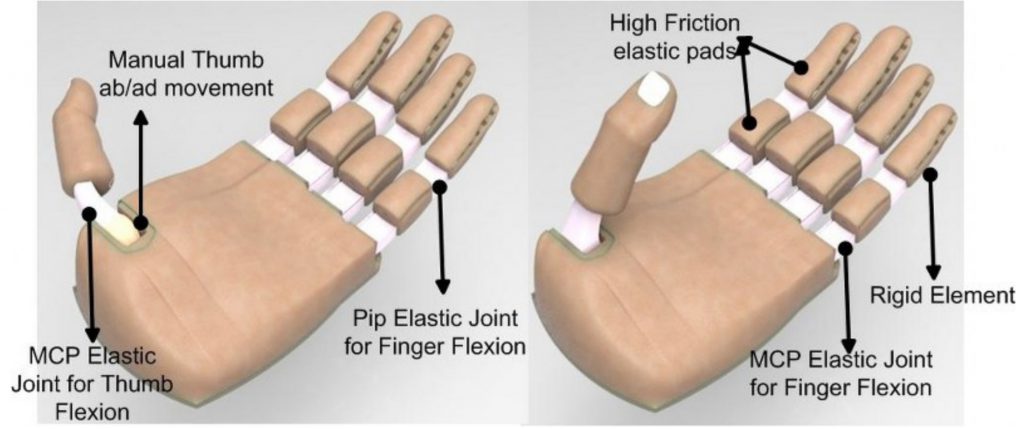
Conceptual design of the Softhand: Each finger is composed of MCP and PIP joints and does not include the DIP joint. The thumb is composed of CMC and MCP joints. Except the non/actuated thumb abduction/adduction joint, all other joints are fabricated with elastic materials.
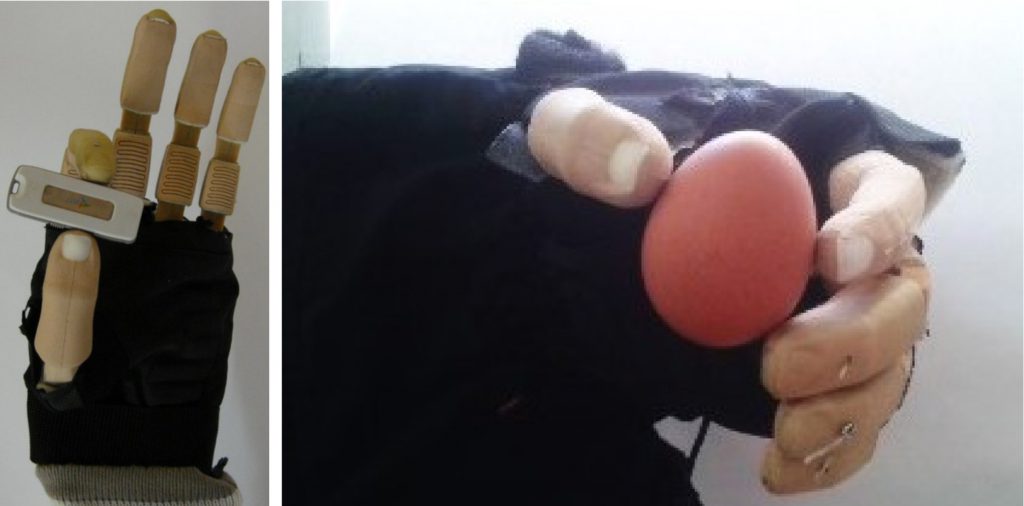
ISR- Softhand performing a tip pinch grasp and a tripod grasp.

First fabrication methods: The 3D printed index finger before casting the Urethane rubber (up); the finger after casting (down)
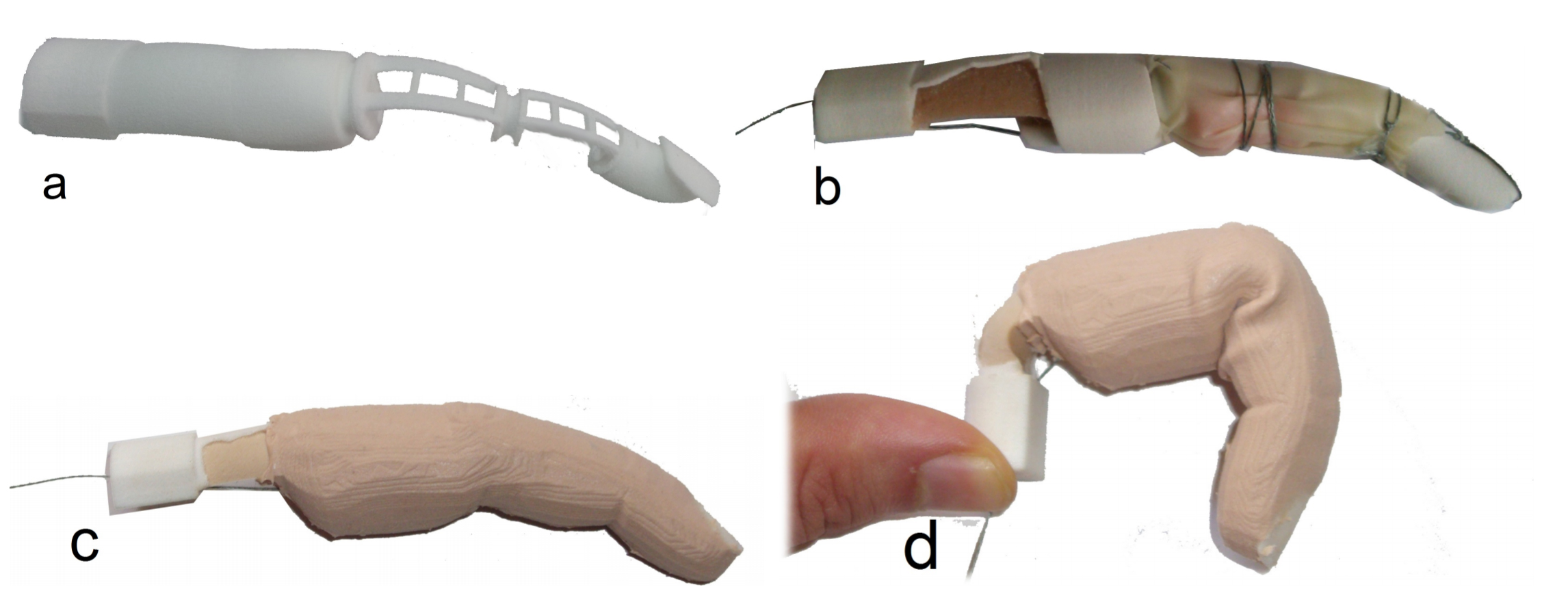
The new fabrication process of the fingers with the second approach—(a) A 3D printed endoskeleton embeds the elastic MCP joint (b) Then the PIP and DIP joints are filled with sponge and covered by an sealing sleeve (c) The exterior surface of the finger is formed by casting a resin in the mold (d) The finger bending.
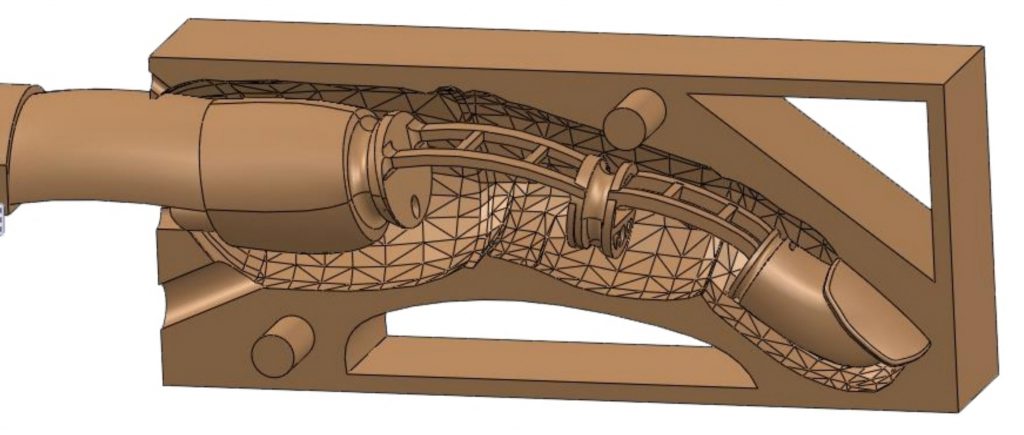
Figure 6. The internal surfaces of the mold are created from 3D scan of a human hand.
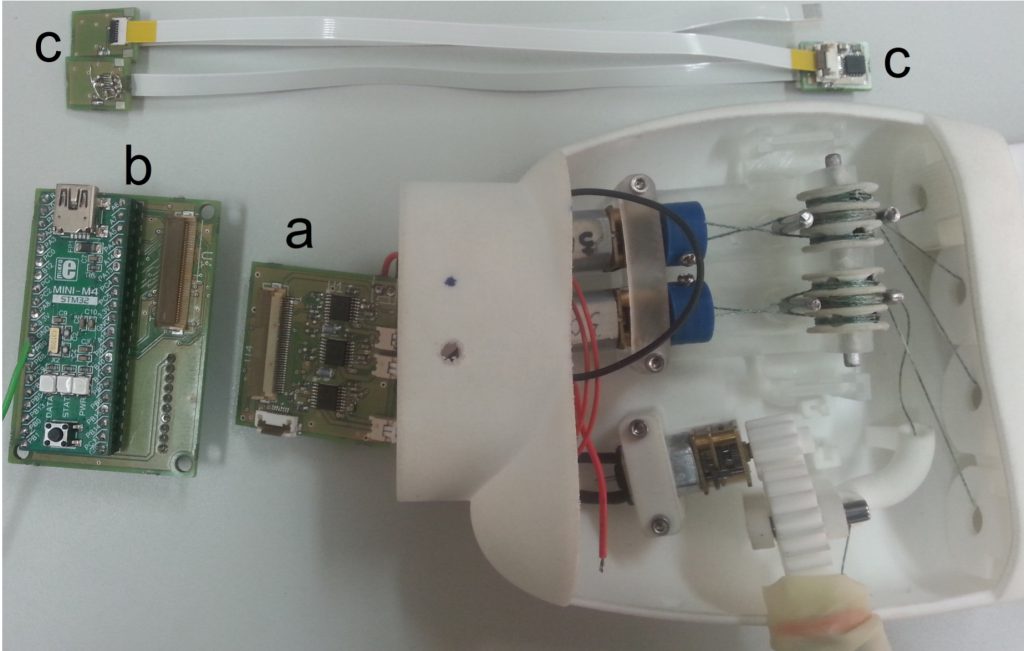
The home made miniaturized electronics. (a) The drivers PCB, composed of motor drivers and input for magnetic encoders (b) The control PCB composed of a STM32 ARM Cortex-M4 STM32 Microcontroller, and a X-bee communication (on the back of the board); (c) The daisy chain magnetic encoders boards.
3D model of the UC-Softhand.
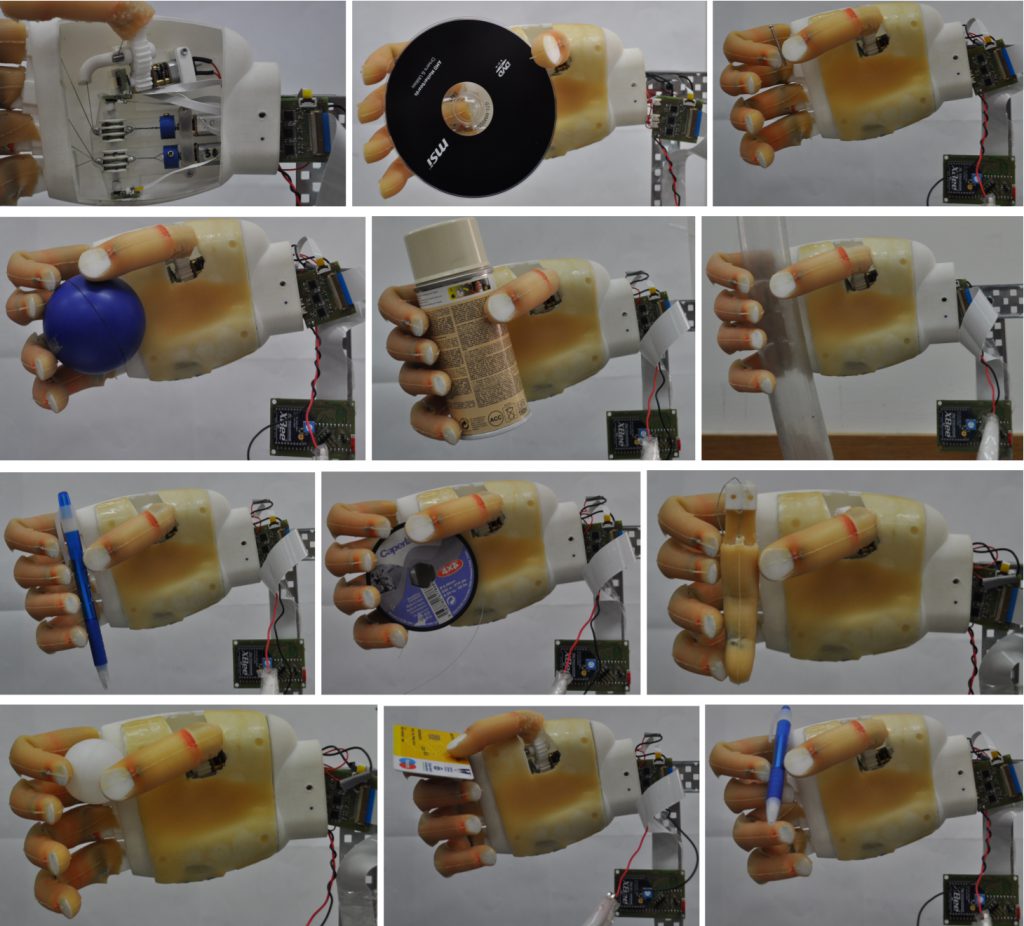
Prototype of the UC-Softhand and achieving several precision and power grasps. The hand is able to grasp objects as large as a CD. Since the thumb and the index finger are operated with a single actuator, the tendon’s slack is adjusted in a way that the tip of both fingers can achieve a precision grasp, such as grasping a tiny screw. The thumb’s rotation enables lateral pinch grasp such as grasping a credit card.
The UC Softhand: Light Weight Adaptive Bionic Hand with a Compact Twisted String Actuation System.
reference missing