

The hybrid OmniClimber robot:
People involved:
- Mahmoud Tavakoli
- João Lourenco
- Carlos Viegas
- Pedro Neto
- Anibal T de Almeida
Climbing robots that integrate an articulated arm as their main climbing mechanism can eventually take advantage of their arm for plane transition and thus to operate on 3D structures rather than only climbing planar surfaces. However, they are usually slower than wheel based climbing robots. Within this research we address this problem by integration of a light-weight arm and adhesion mechanism into an omnidirectional wheel based climbing robot, thus forming a hybrid mechanism that is agile in climbing and still able to perform plane transition. A 2DOF (Degree of Freedom) plannar mechanism with 2 linear actuators was designed as a light-weight manipulator for the transition mechanism. Furthermore, we customized and developed actuated switchable magnets both for the robot chassis and also as the adhesion unit of the arm.
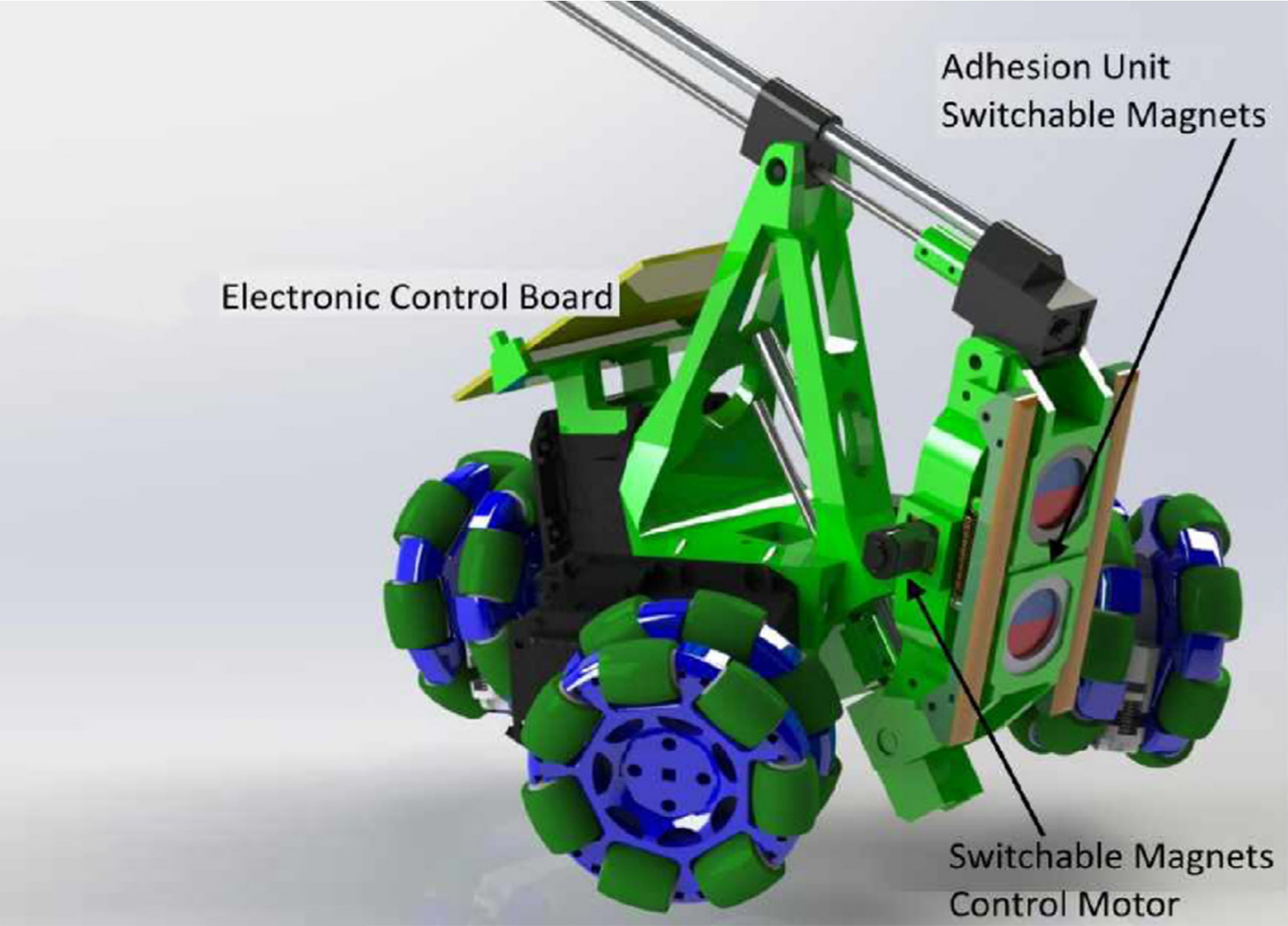
Current version of OmniClimber with the transition mechanism closed.
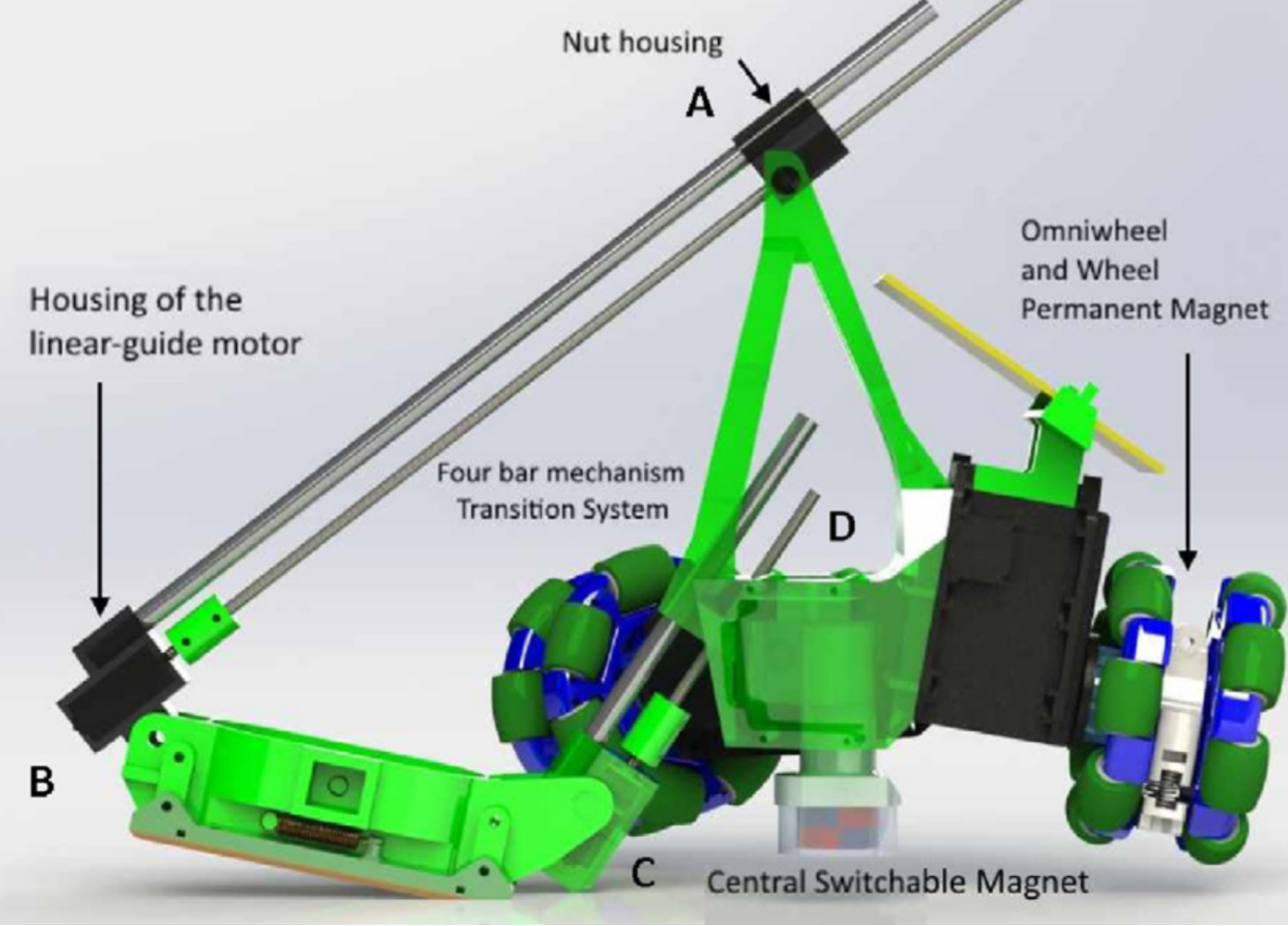
Current version of OmniClimber with the transition mechanism open and central magnet in detail.
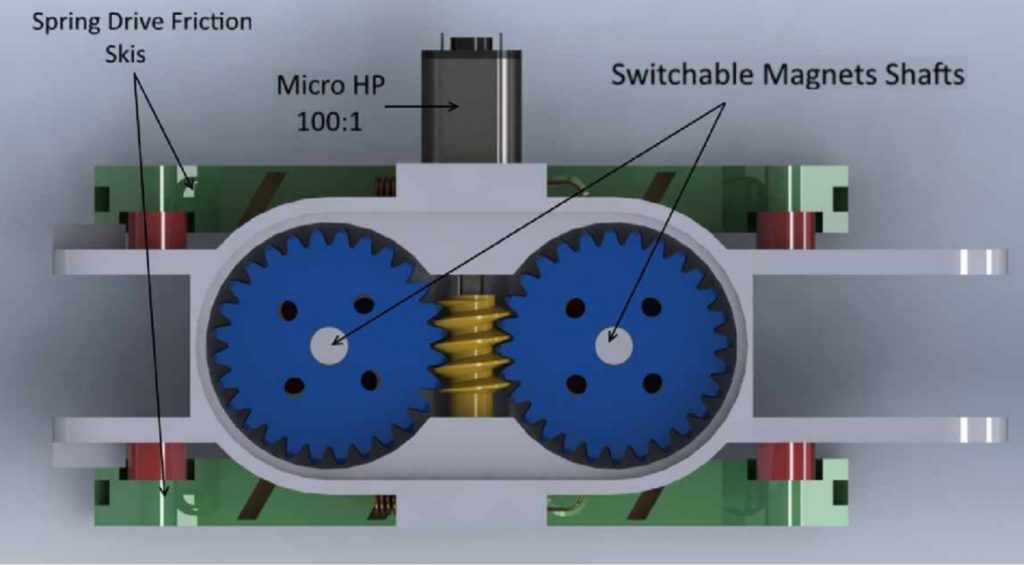
Adhesion unit worm drive transmission and friction skis.
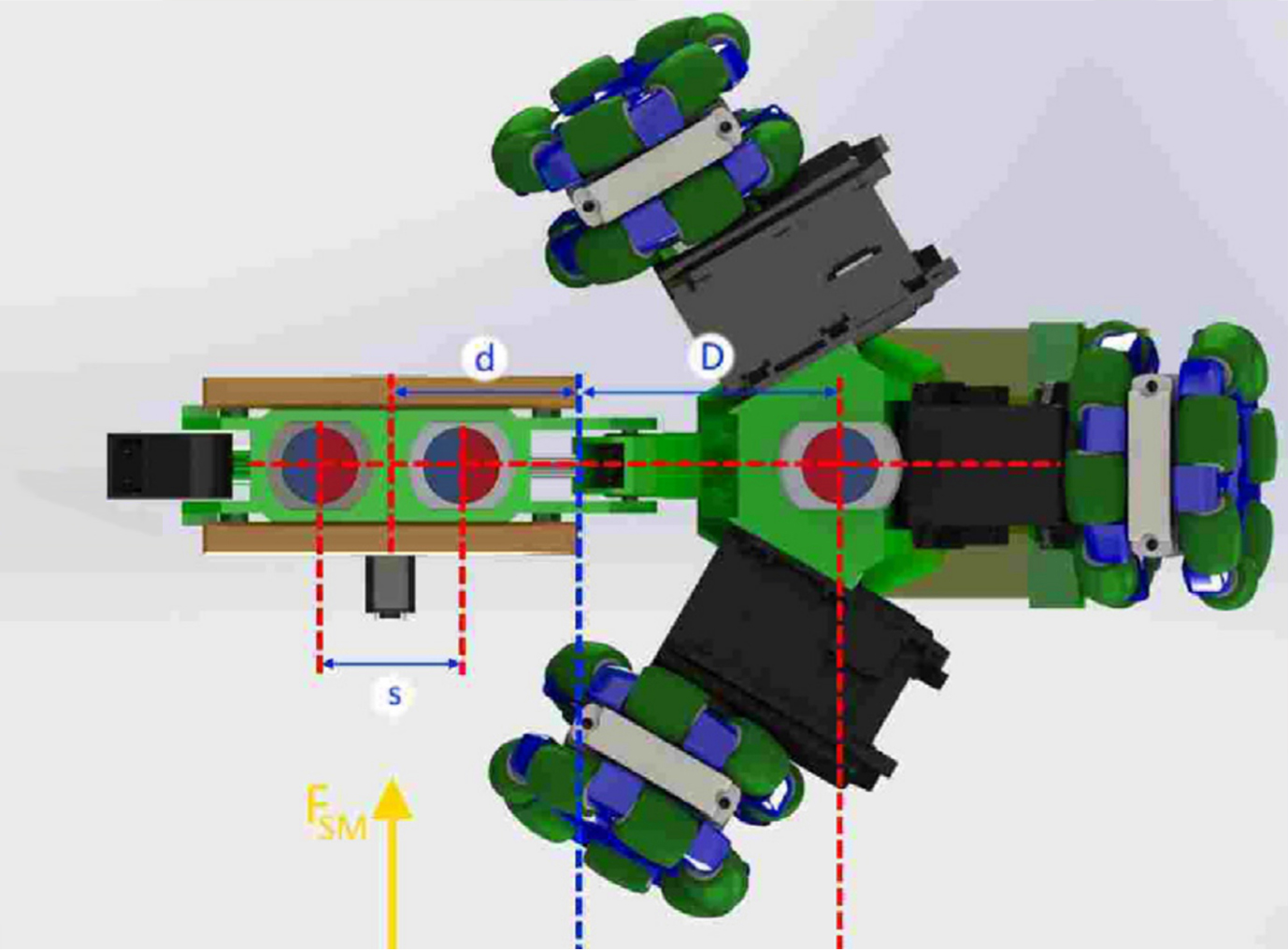
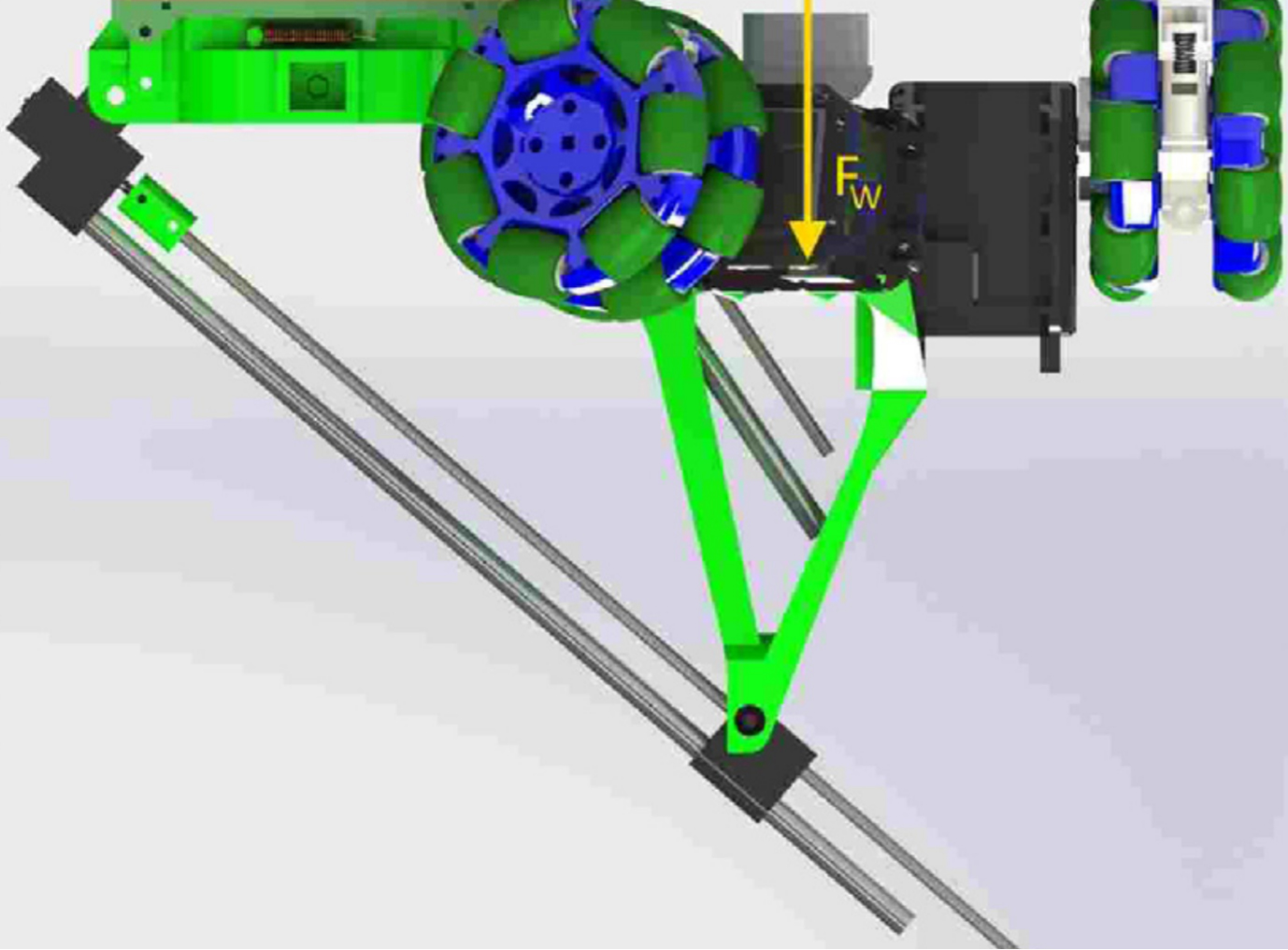
Distances and forces diagram.
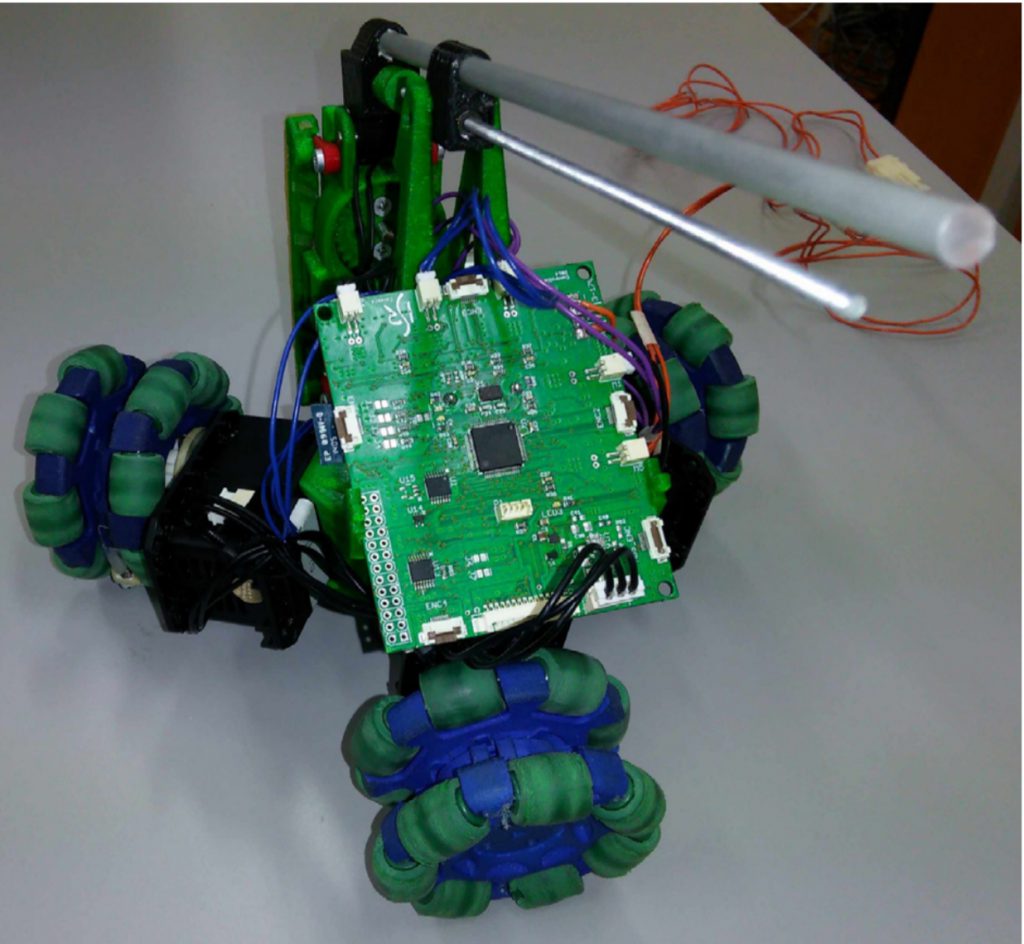
The new protoype of the Omniclimber.
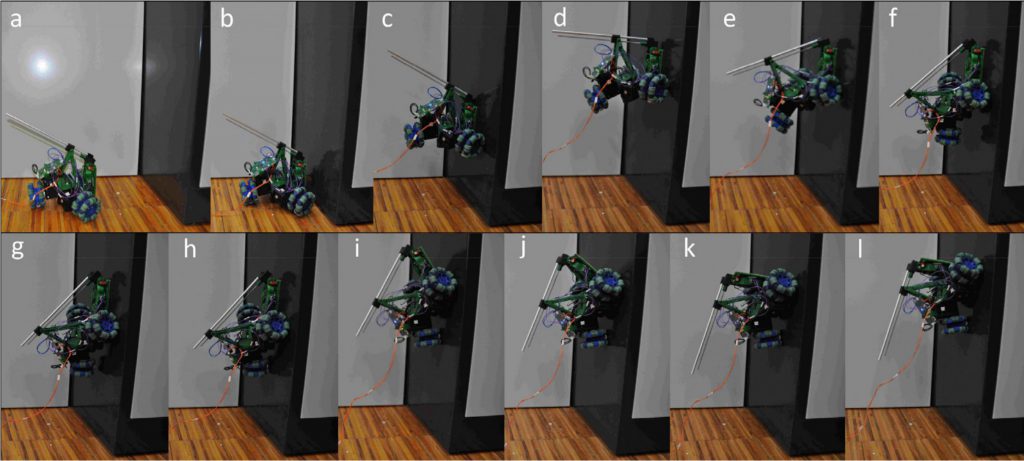
Video frames of the robot performing the transition between the floor and a vertical surface.
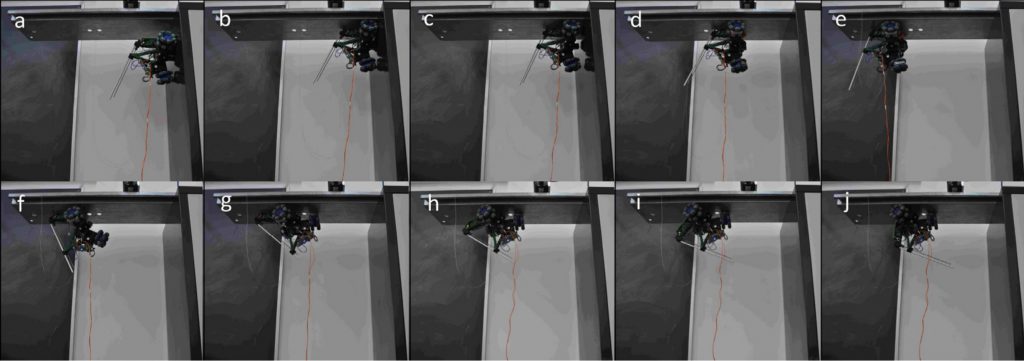
Video frames of the robot performing the transition between a vertical wall and a celling.
The hybrid OmniClimber robot: Wheel based climbing, arm based plane transition, and switchable magnet adhesion
reference missing