

Actuation strategies for underactuated anthropomorphic hands.
People involved:
- Mahmoud Tavakoli
- Baptiste Enes
- Lino Marques
- Anibal T De Almeida
This paper aims to analyze the number of actuators as well as the actuation strategy for an underactuated prosthetic hands. Two comprehensive analysis were made for this purpose. 16 possible actuation strategies in five categories of one to five actuators were defined. Based on these 16 strategies two analysis were performed: grasp diversity and grasp functionality. For the first analysis we defined a performance metric based on all possible grasps by the human hand, while in the second analysis only the top grasps with the highest frequency of usage were considered. By comparing the performance of these strategies we obtained some interesting results regarding the best actuation strategies for the underactuated anthropomorphic hands.
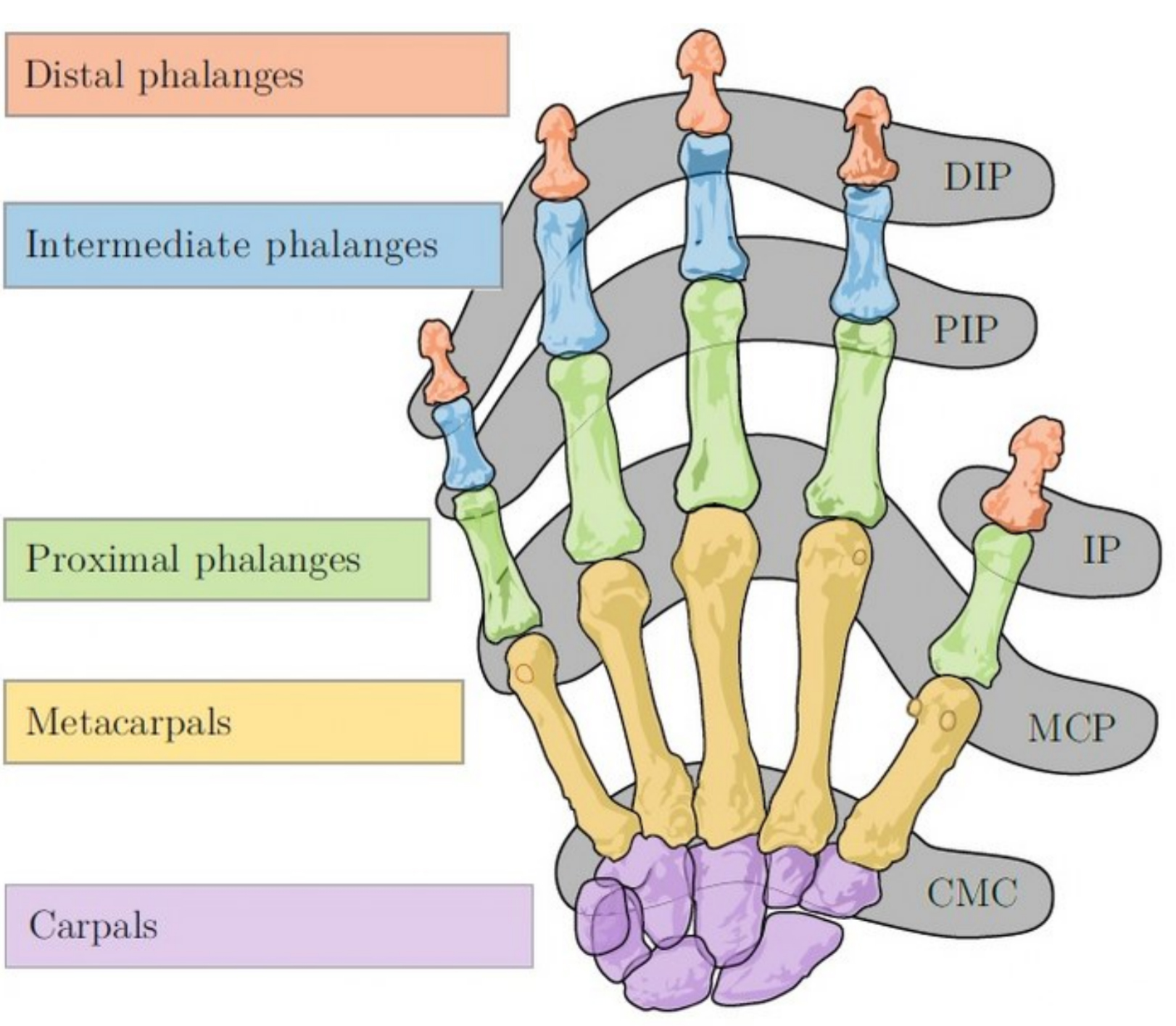
Bones and joints of the human hand. DIP – Distal Interphalangeal joint; PIP – Proximal Interphalangeal joint; IP – Interphalangeal joint; MCP – Metacarpophalangeal joint; CMC – Carpo-Metacarpal joint.
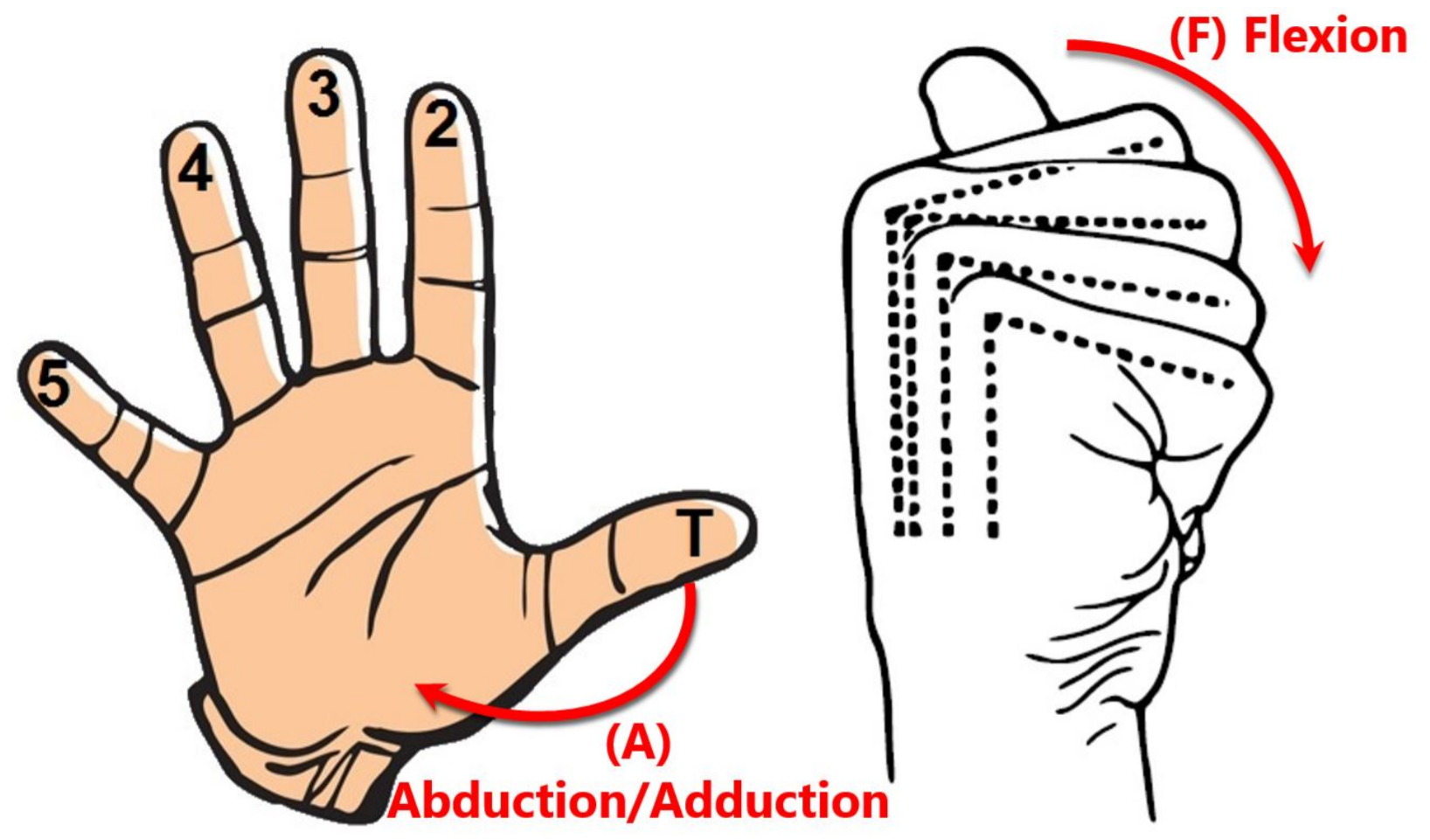
Number and symbol designations (right hand palmar view); Range of motion of the MCP joint (A) Abduction/Adduction of the thumb and (F) Flexion of the fingers.
Actuation strategies for underactuated anthropomorphic hands.
M. Tavakoli, B. Enes, L. Marques and A. T. de Almeida, “Actuation strategies for underactuated anthropomorphic hands,” 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, 2014, pp. 274-280. doi: 10.1109/IROS.2014.6942572