

Analysis and application of dual-row omnidirectional wheels for climbing robots.
People involved:
- Mahmoud Tavakoli
- Carlos Viegas
Omniclimbers are climbing robots with high maneuverability for inspection of ferromagnetic flat and curved human made structures. Omnidirectional wheels are used in Omniclimbers in order to increase the robot’s maneuverability on the structures. This paper studies application of omnidirectional wheels in climbing robots and associated problems such as vibrations. Such vibrations are more problematic on climbing robots than terrestrial robots. In this study we evaluated the design parameters of the wheels, in order to reduce such vibrations, increase the wheels traction and reduce their mass.
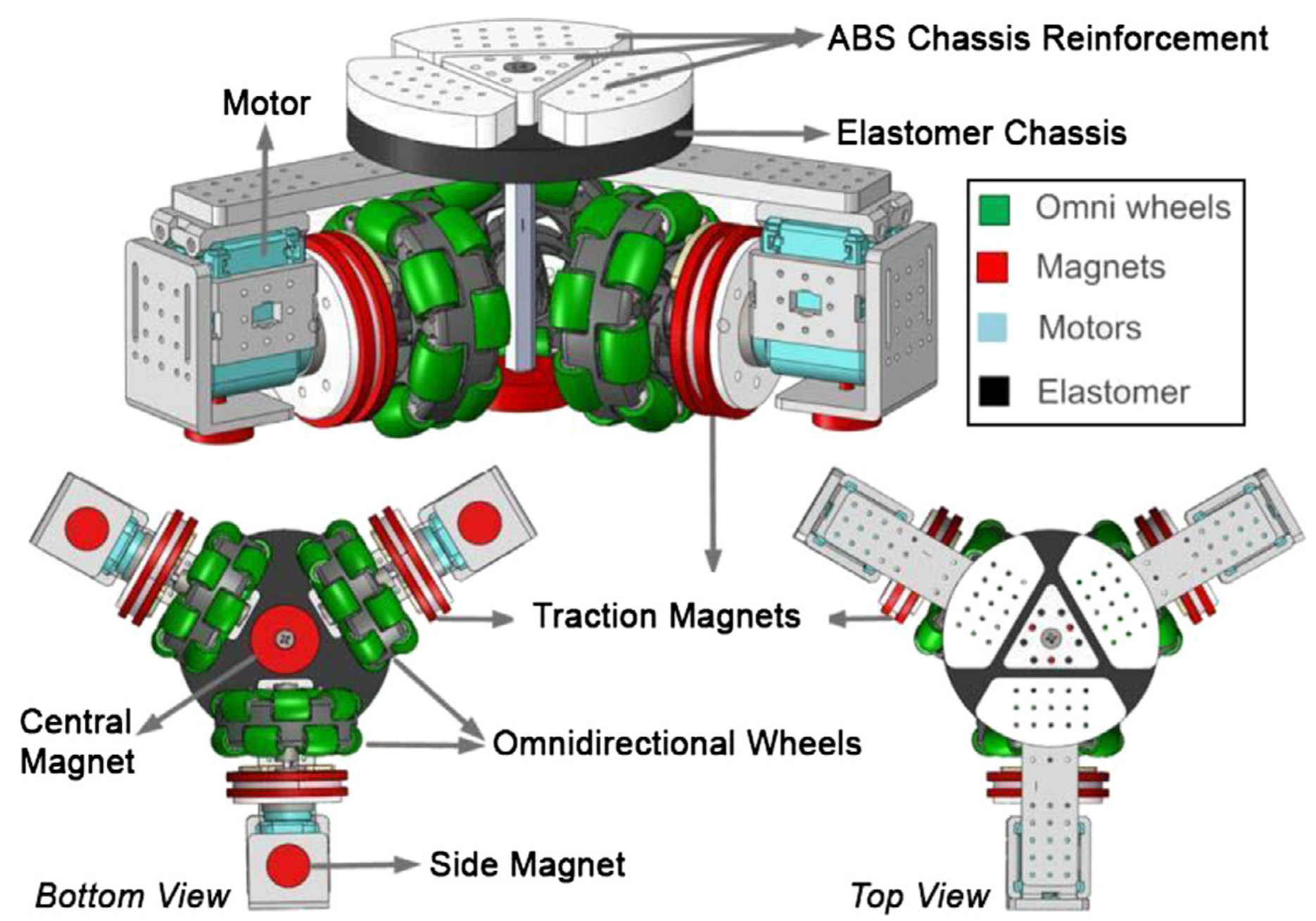
Omniclimber-I is composed of a central magnet unit, a flexible chassis and side magnets, and omnidirectional wheels coupled with ring magnets.
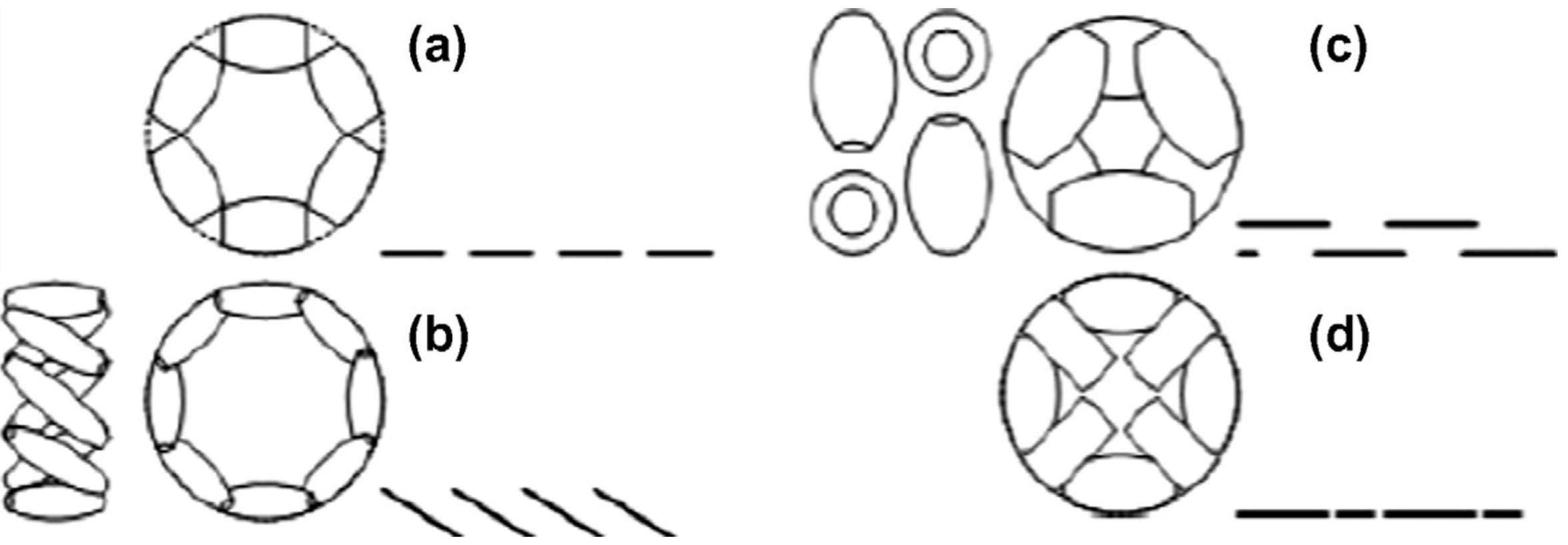
Various types of Omnidirectional wheels and their traces; (a) Classic 1 row omniwheel, (b) Mecanum, (c) Classic 2 rows omniwheel, and (d) continuous alternate wheel.
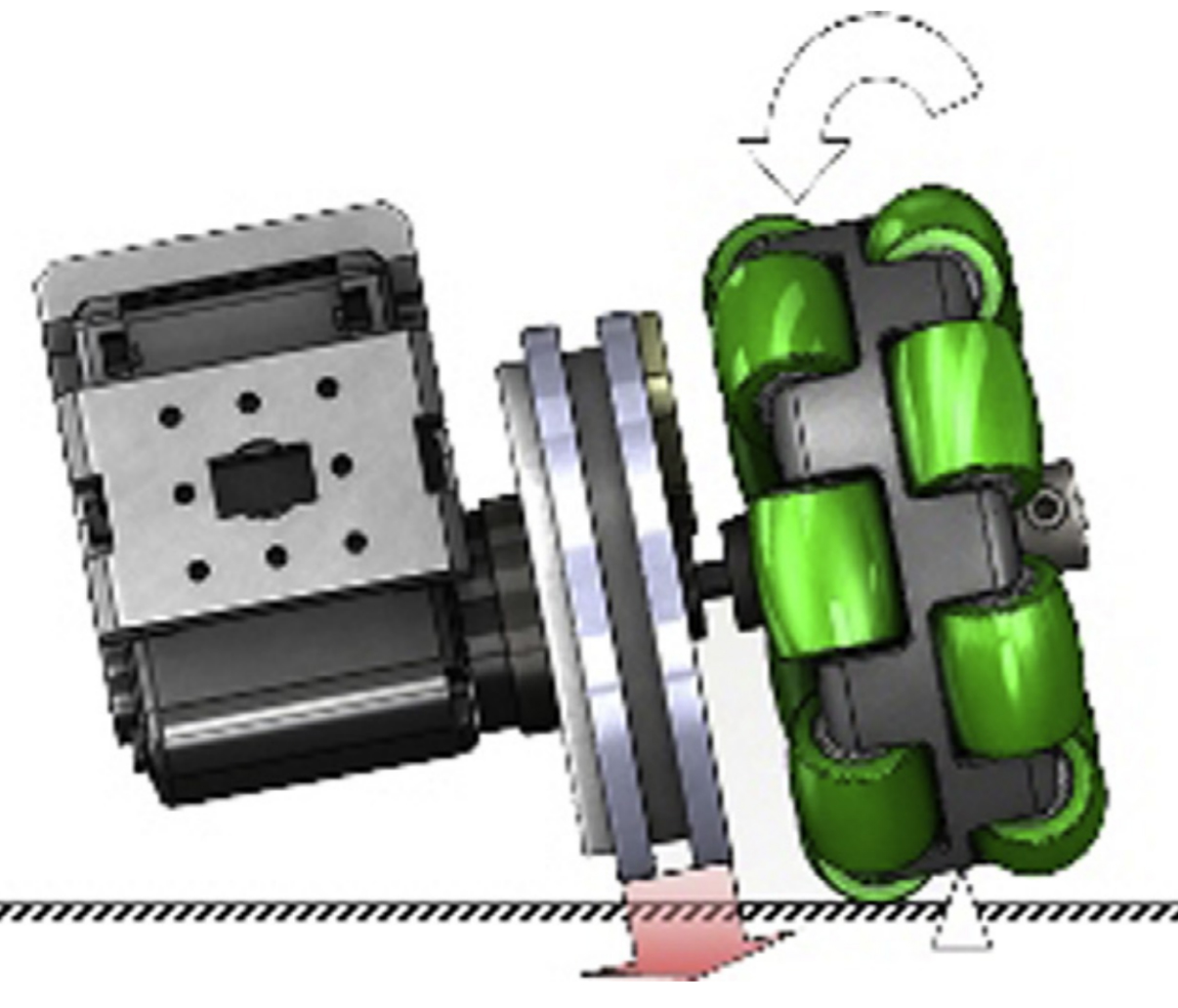
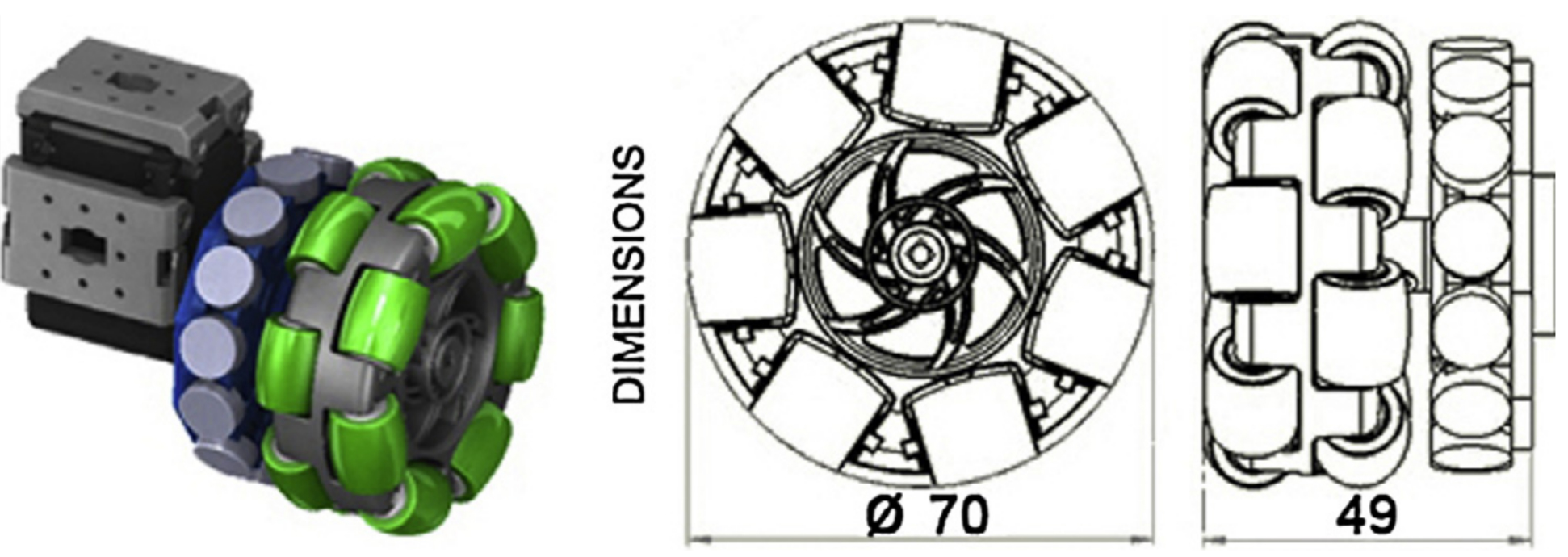
1St generation of magnetic wheel.
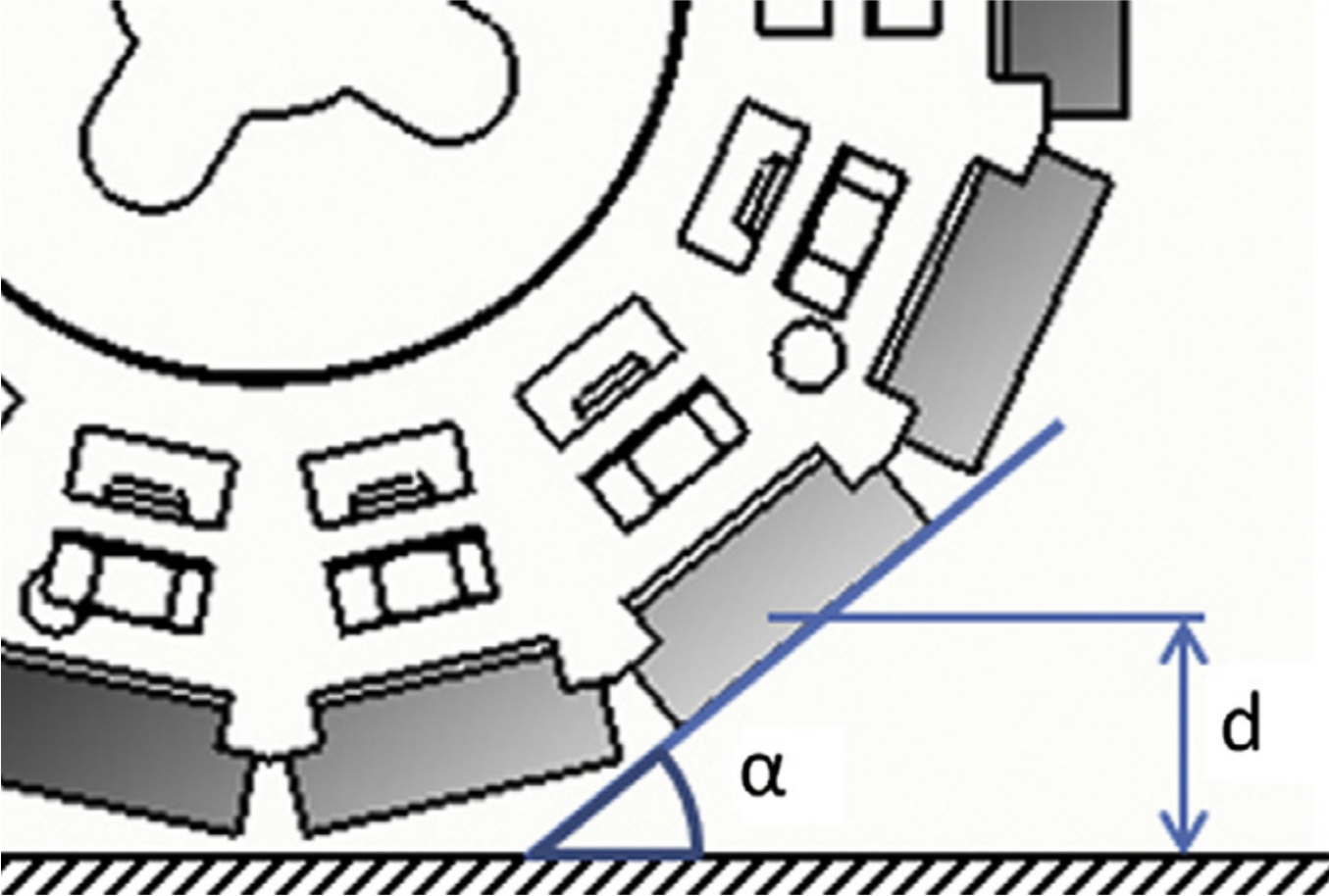
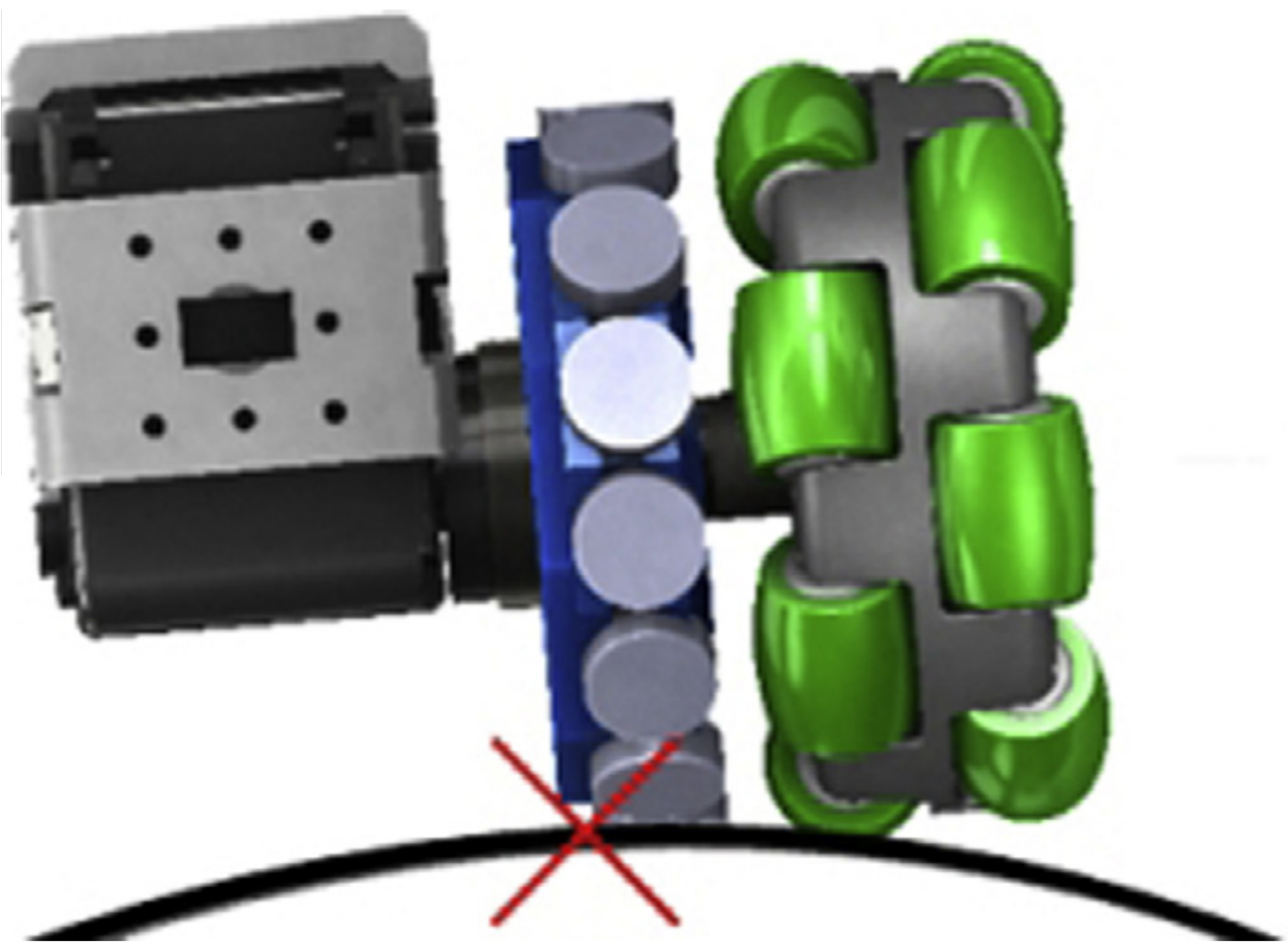
To avoid direct contact of the magnet with the surface and tilting of the wheel, the ring magnet should be small enough to keep a certain distance from the surface, which reduces the normal magnetic force.
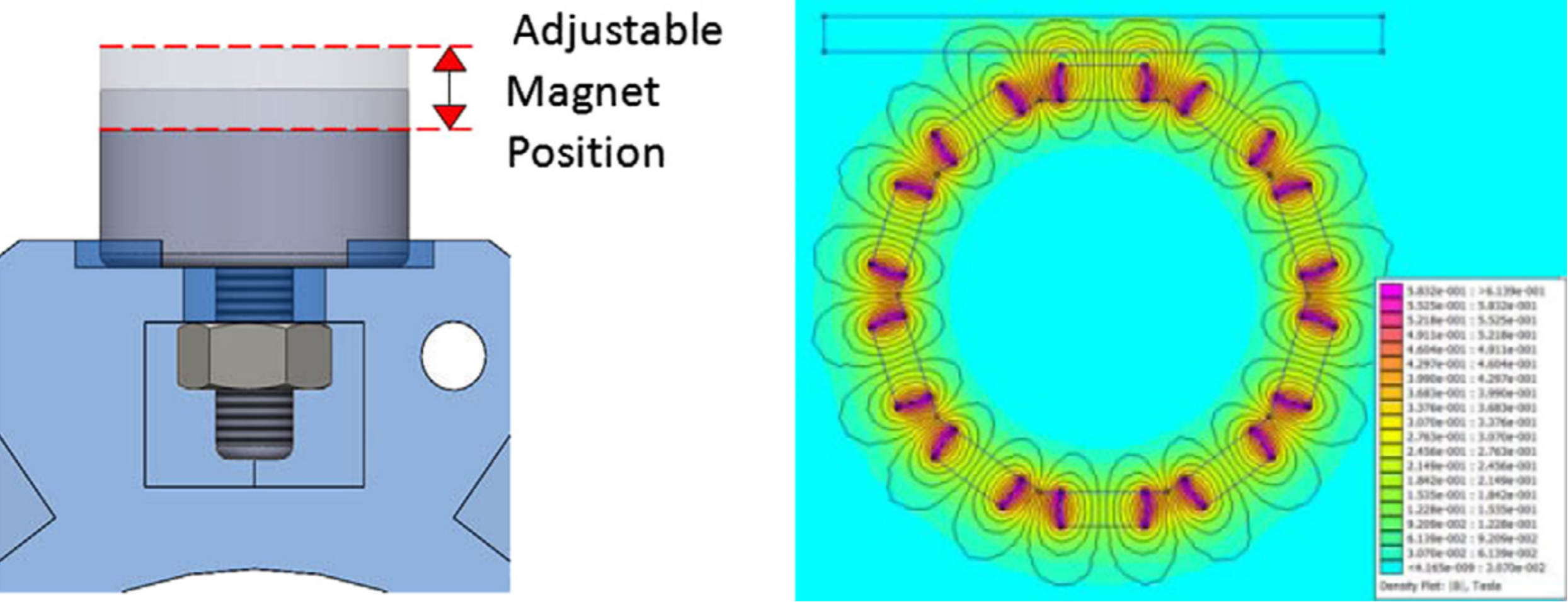
2Nd generation of magnetic wheel, with adjustable distance between the magnets and the surface.
On the left: Adjustable Magnet Positioning System. On the right: Magnetic Flux simulation software was used in order to estimate the adherence force of each situation (air gap of 0.5 mm).
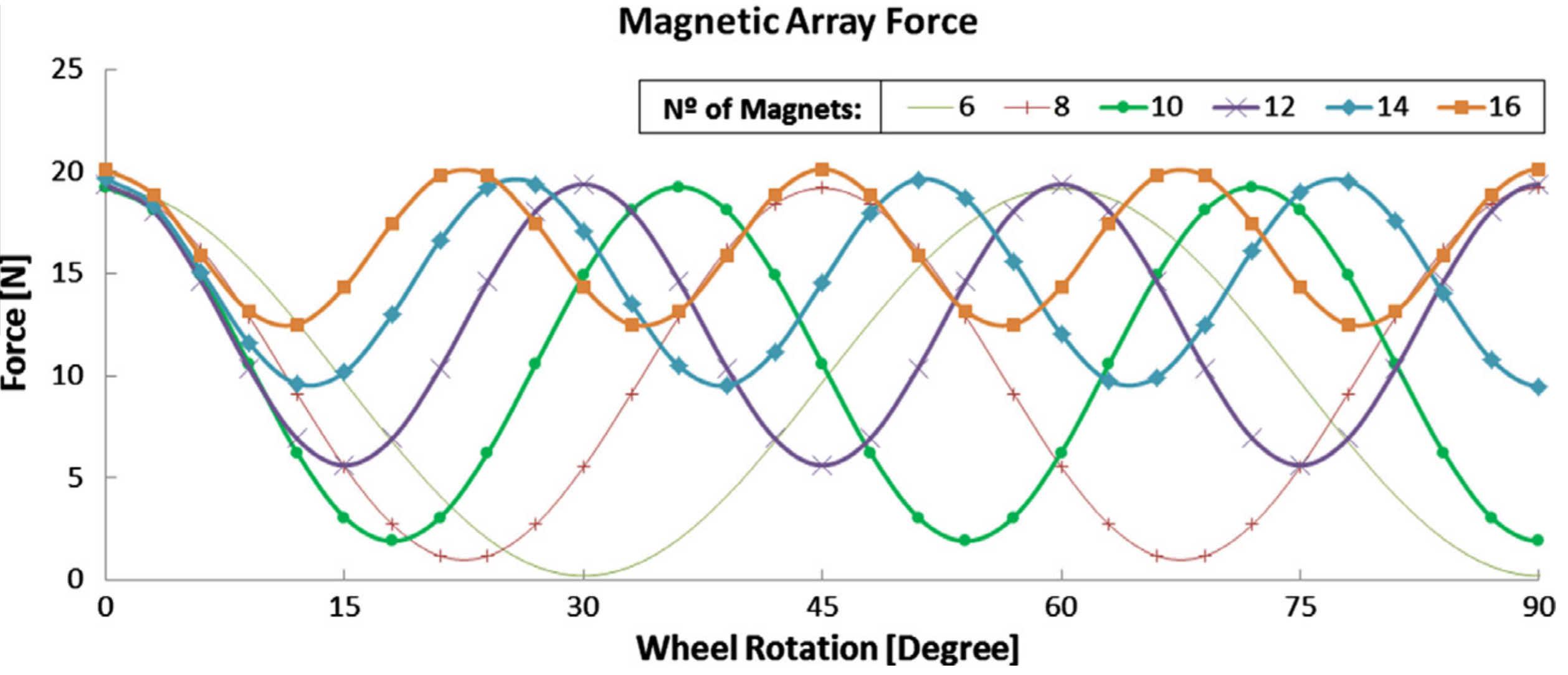
Magnetic force analytically determined for each solution, for 90 degree rotation of the wheel (air gap of 0.5 mm).
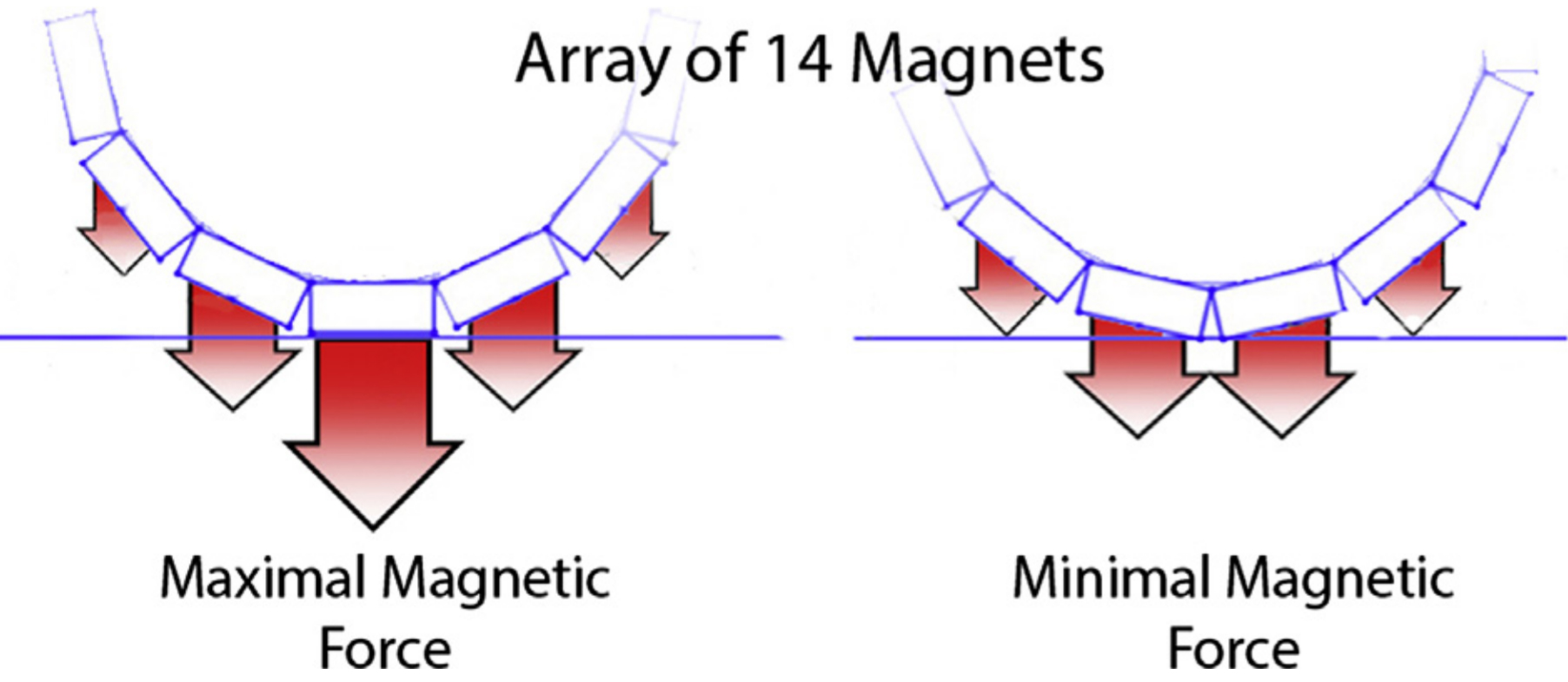
Wheel positions for maximal and minimal magnetic force. The maximum magnetic attraction force occurs when one of the magnets is parallel to the surface and the minimum attraction force occurs when all magnets are tilted relatively to the surface.
For each wheel with an array of magnets from 6 to 16, we calculated the magnetic force for the closest magnets to the surface, taking into account its distance and angle.
The normal force of the 2nd generation of the wheel is 2.45 times of the first generation, however the tilting problem is not yet solved.
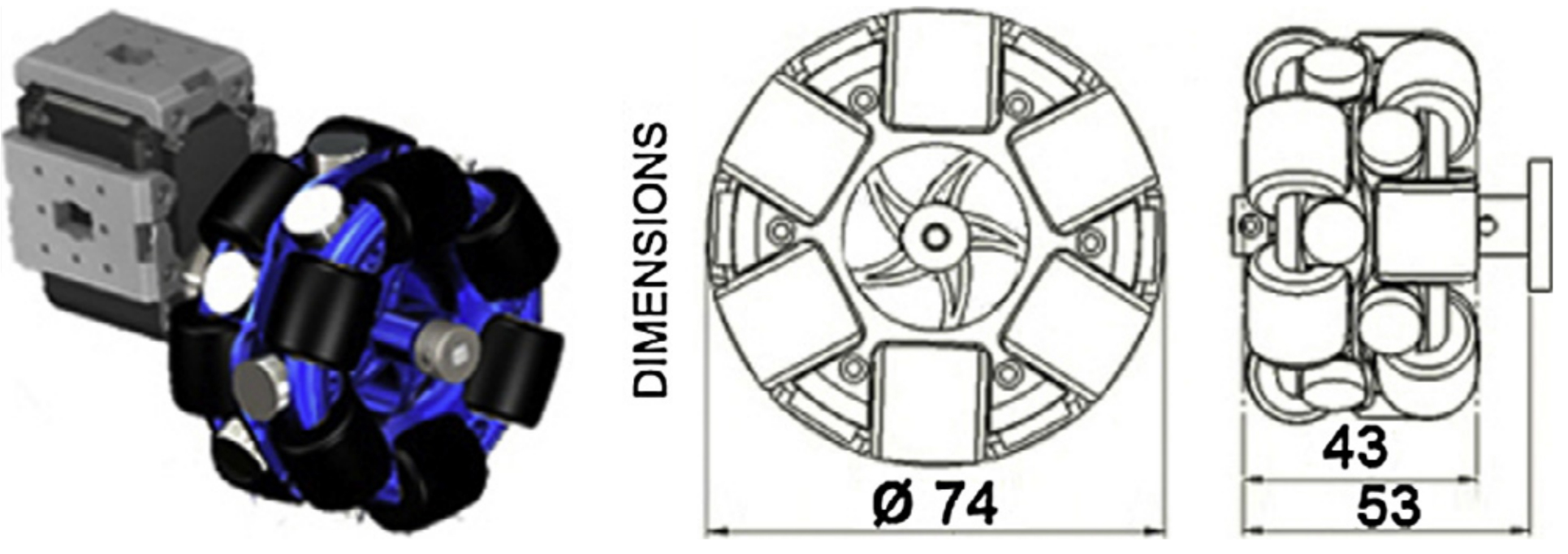
3Rd generation of magnetic wheel.
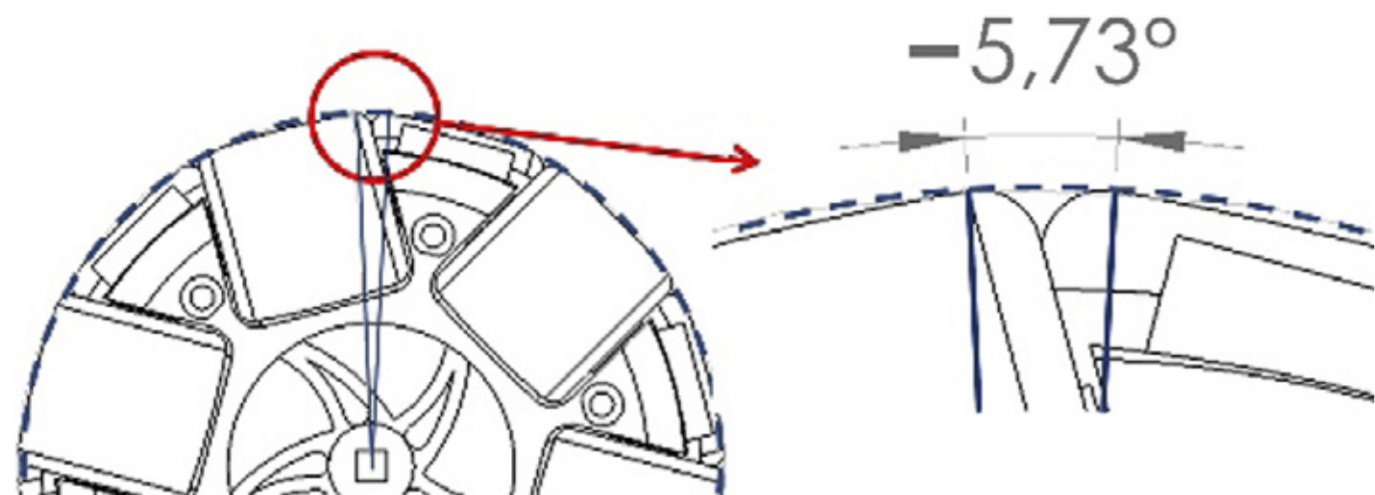
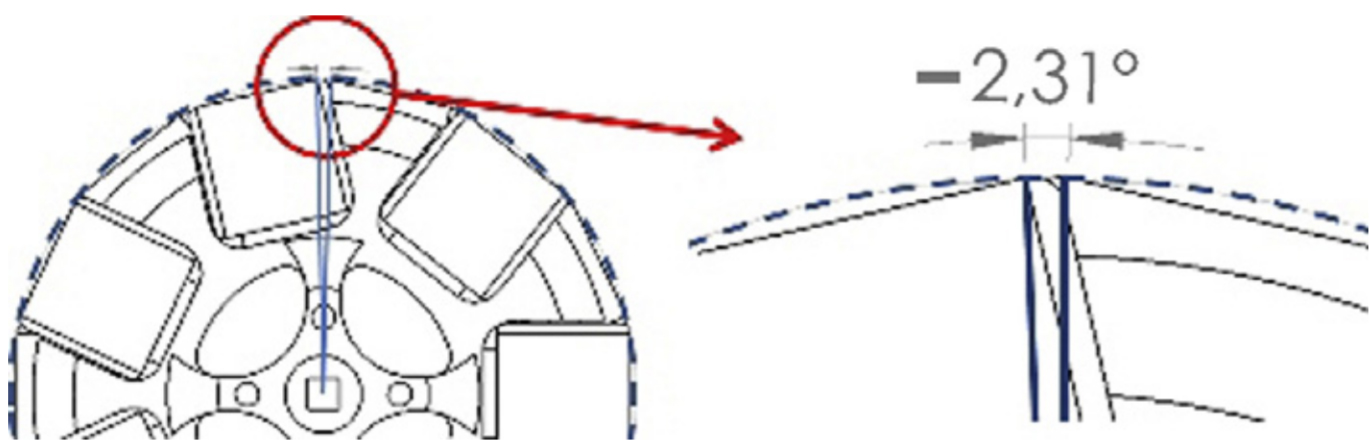
Gap of the roller coverage in the 3rd generation of the magnetic omniwheel.
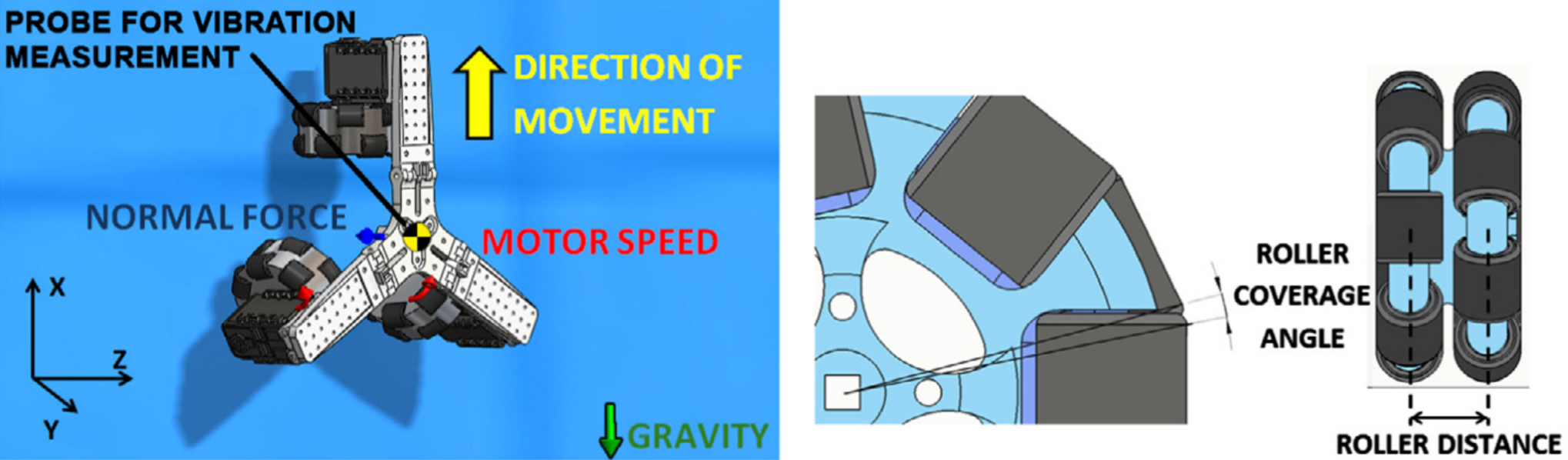
Simulation environment and parameters tested, including magnetic force, wheel coverage and distance between rollers.
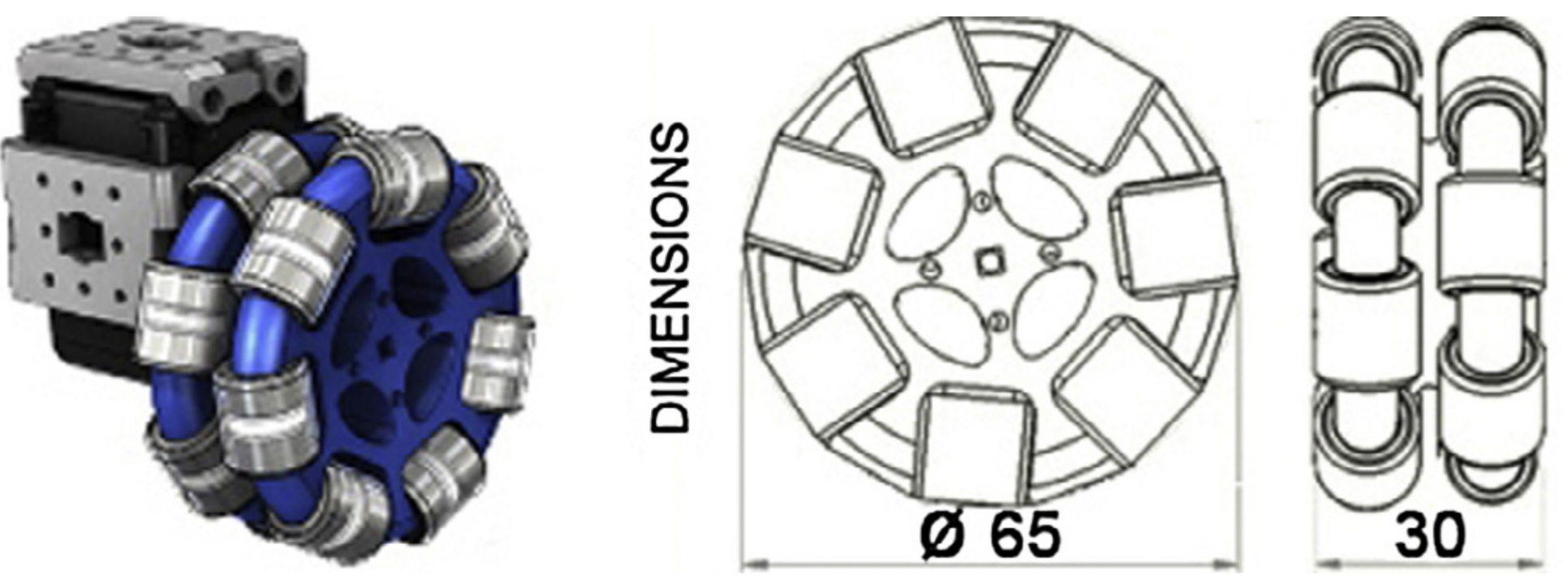
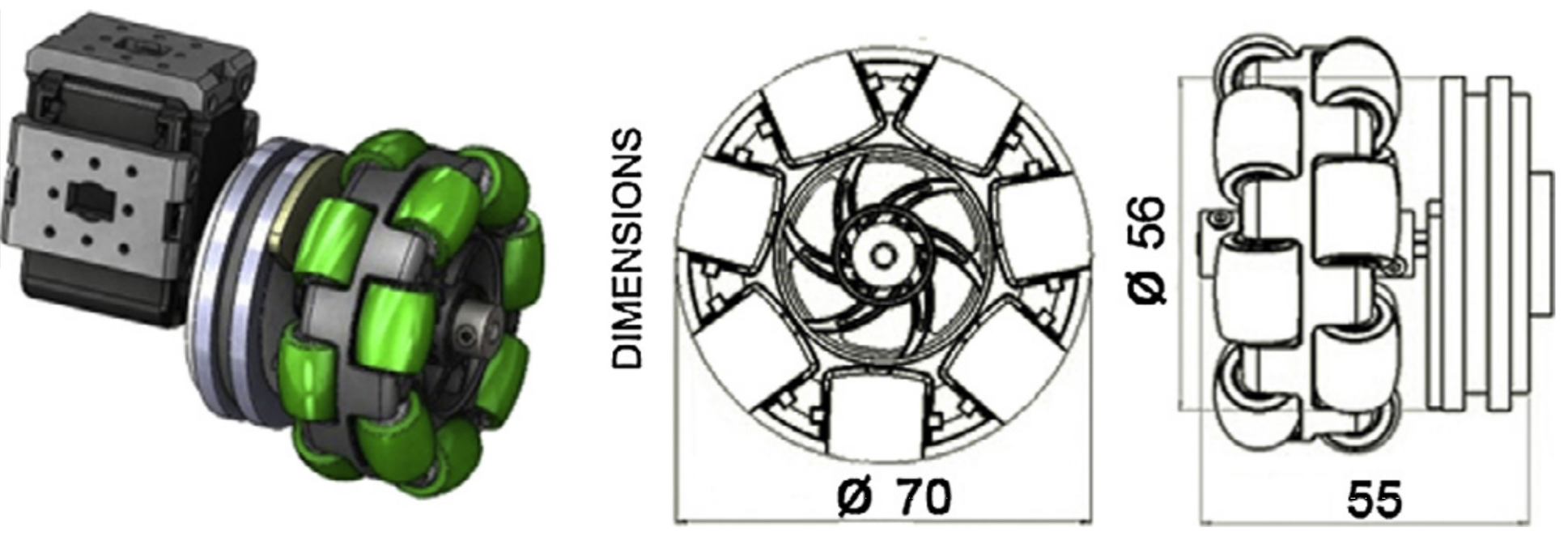
4Th generation of magnetic wheel.
Roller coverage of the 4th generation of magnetic wheels.

The latest version of the omniclimber robot integrates 4th generation of the developed wheel, a smaller chassis, and low friction central and side magnets.
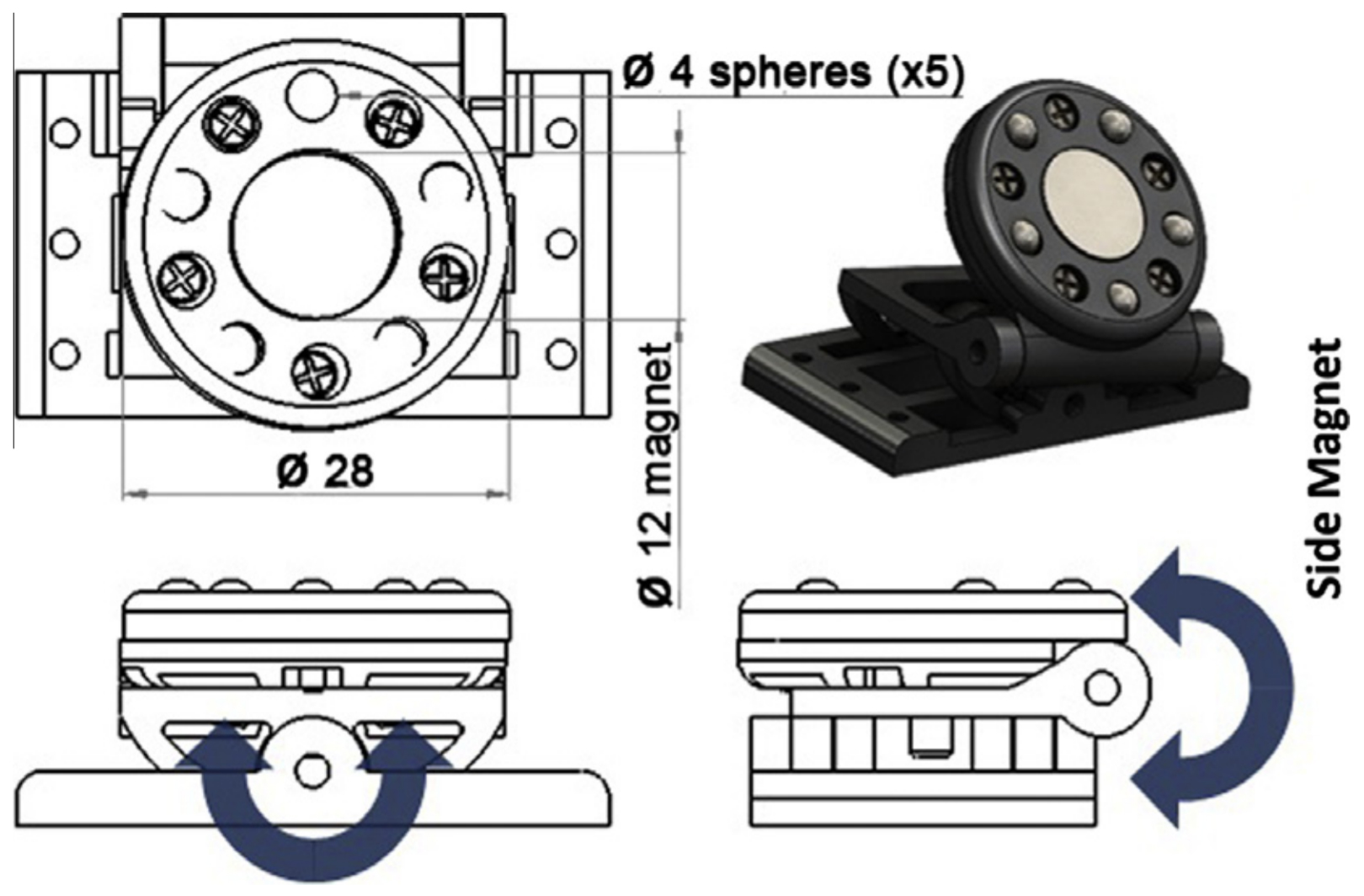
Integration of steel balls as rolling elements into the side magnet units in order to reduce the resistive friction force, while keeping the normal attraction force constant.

The latest version of the Omniclimber robot is able to climb and navigate on pipes with a diameter as low as 220 mm.
Analysis and application of dual-row omnidirectional wheels for climbing robots.
M. Tavakoli, C. Viegas (2014), Analysis and application of dual-row omnidirectional wheels for climbing robots,
Mechatronics, Volume 24, Issue 5, 436-448, ISSN 0957-4158.