

Magnetic omnidirectional wheels for climbing robots.
People involved:
- Mahmoud Tavakoli
- Carlos Viegas
- Lino Marques
- JN Pires
- Anibal T De Almeida
This paper describes design and development of omnidirectional magnetic climbing robots with high maneuverability for inspection of ferromagnetic 3D human made structures. The main focus of this article is design, analysis and implementation of magnetic omnidirectional wheels for climbing robots. We discuss the effect of the associated problems of such wheels, e.g. vibration, on climbing robots.
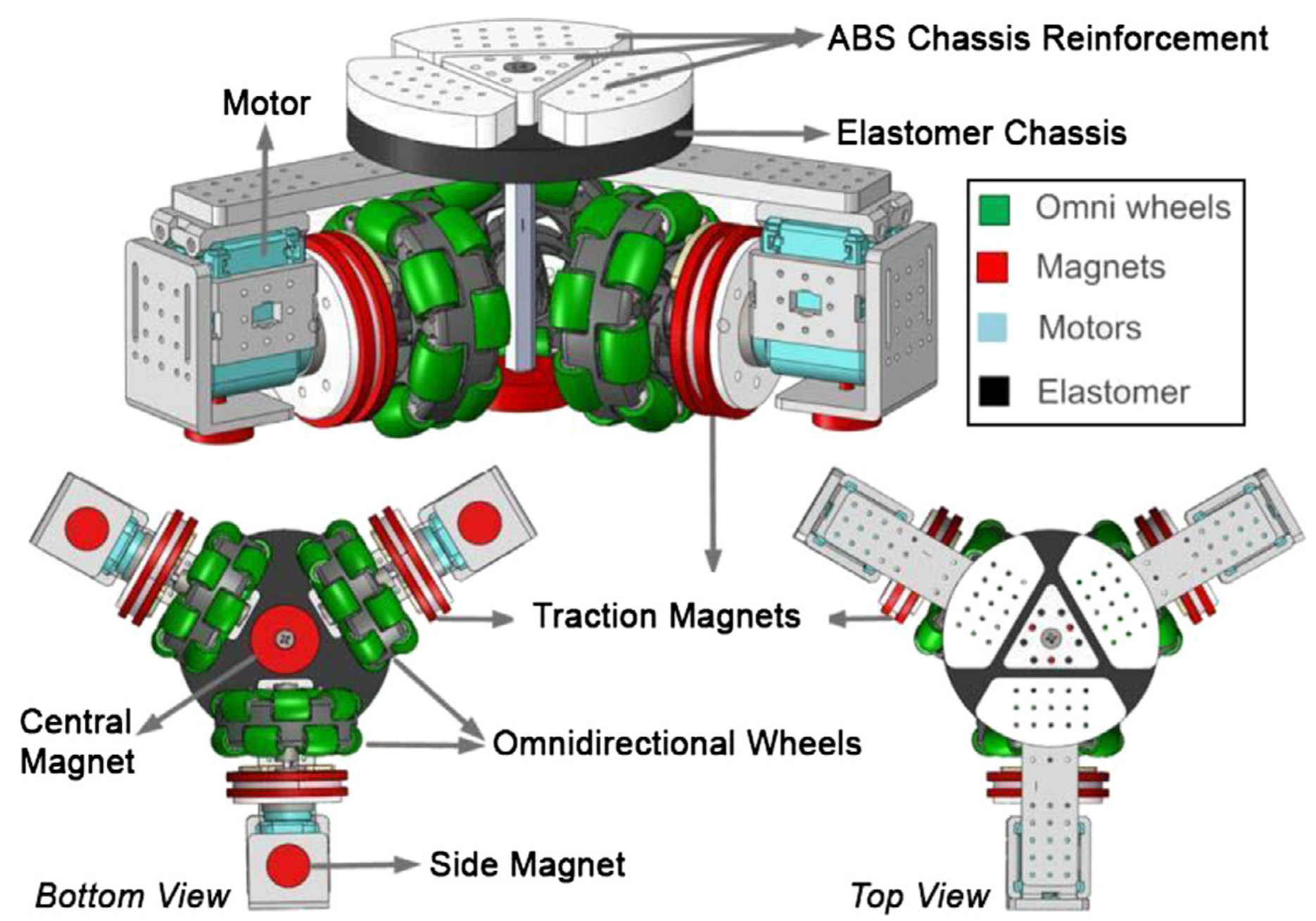
Omniclimber-I is composed of a central magnet unit, a flexible chassis and side magnets, and omnidirectional wheels coupled with ring magnets.
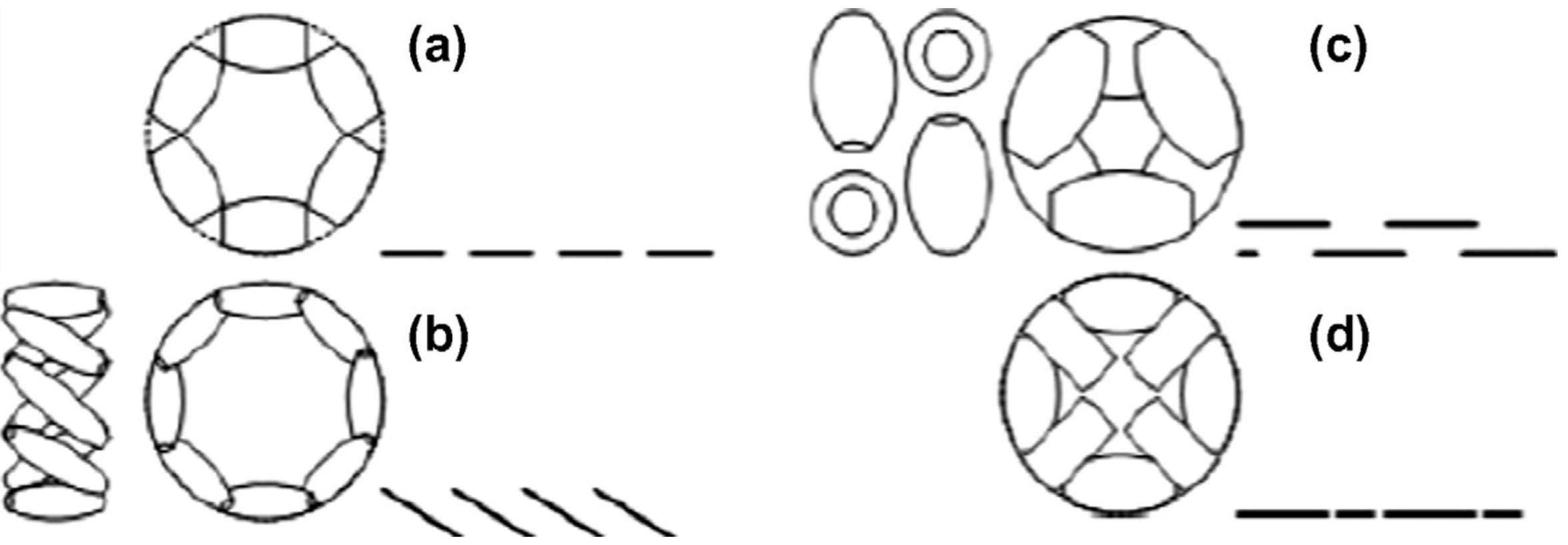
Various types of Omnidirectional wheels and their traces; (a) Classic 1 row omniwheel, (b) Mecanum, (c) Classic 2 rows omniwheel, (d) continuous alternate wheel.
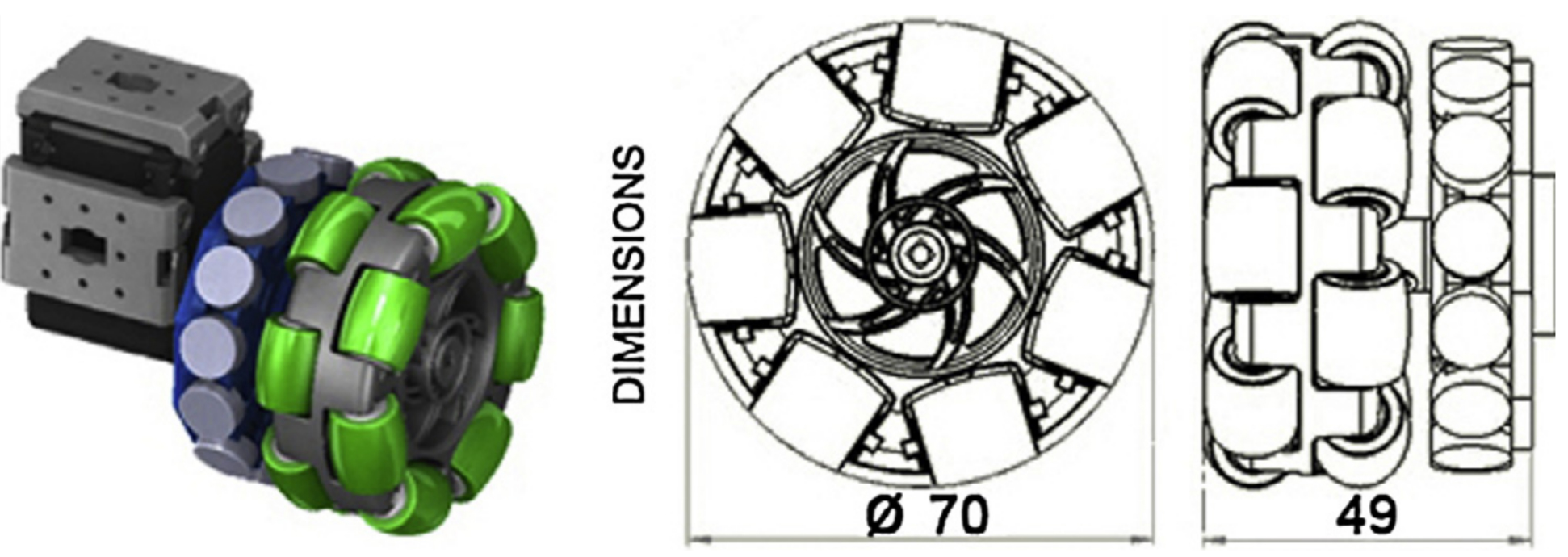
Design of the 1st generation of magnetic wheels.
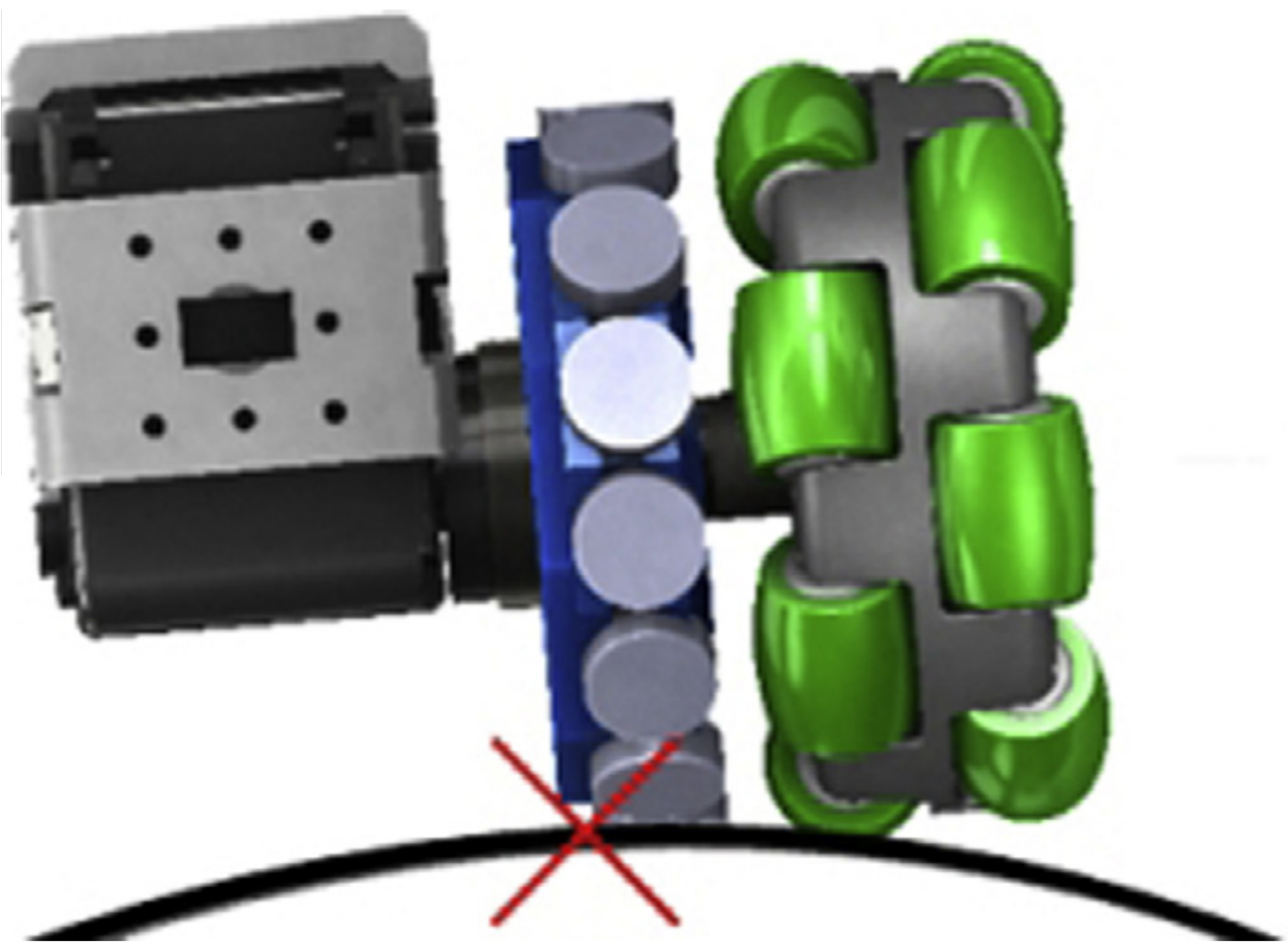
To avoid direct contact of the magnet with the surface and tilting of the wheel, the ring magnet should be small enough to keep a certain distance from the surface, which reduces the normal magnetic force.
Design of the 2nd generation of magnetic wheels, with adjustable distance between the magnets and the surface.
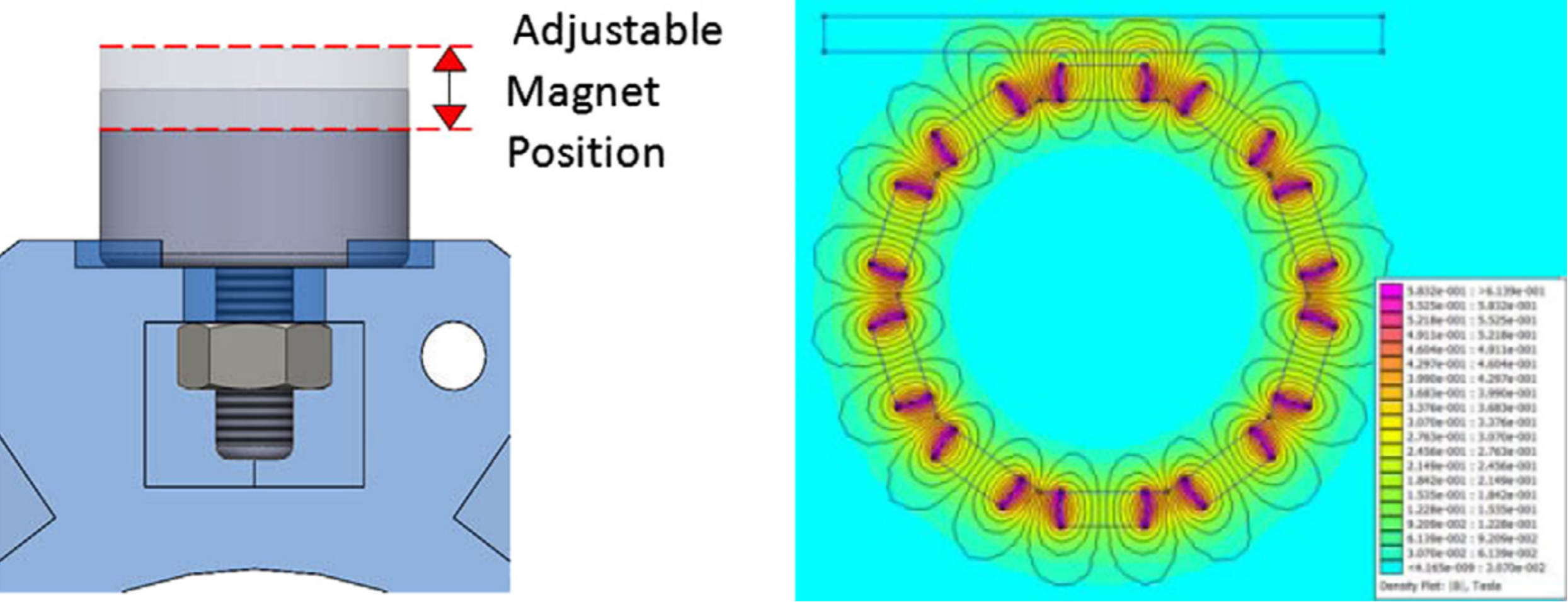
On the left: Adjustable Magnet Positioning System. On the right: 2D Magnetic Flux Field Representation.
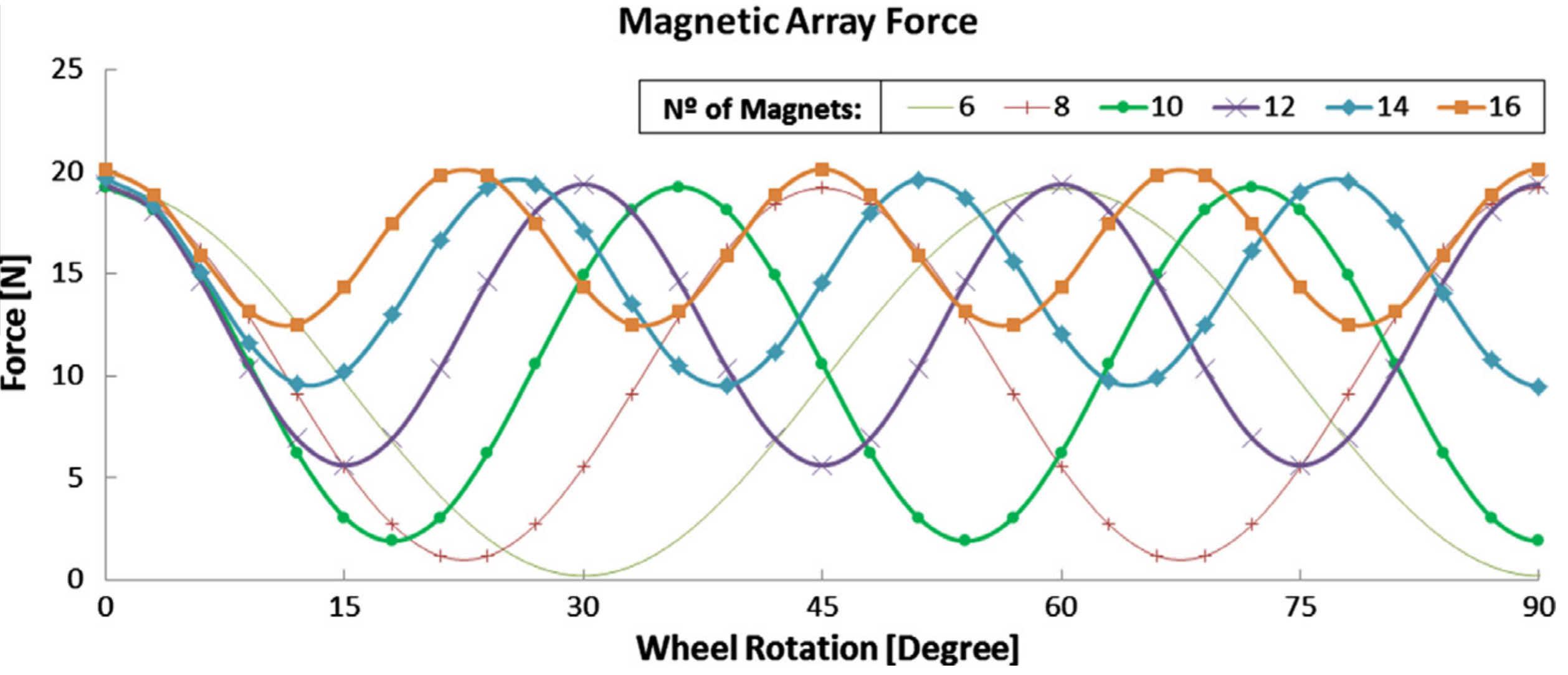
Magnetic Force Analytically determined for each solution, for 90°degree rotation of the wheel.
The normal force of the 2nd generation of the wheel is 2.45 times of the first generation, however the tilting problem is not yet solved.
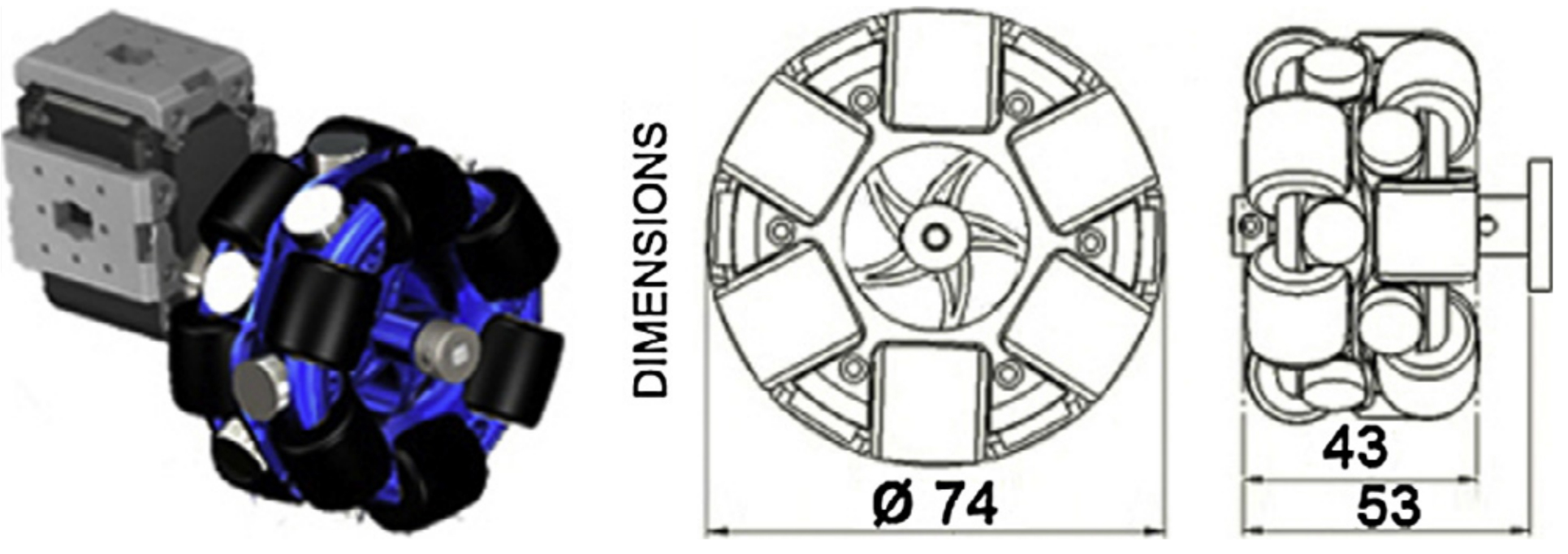
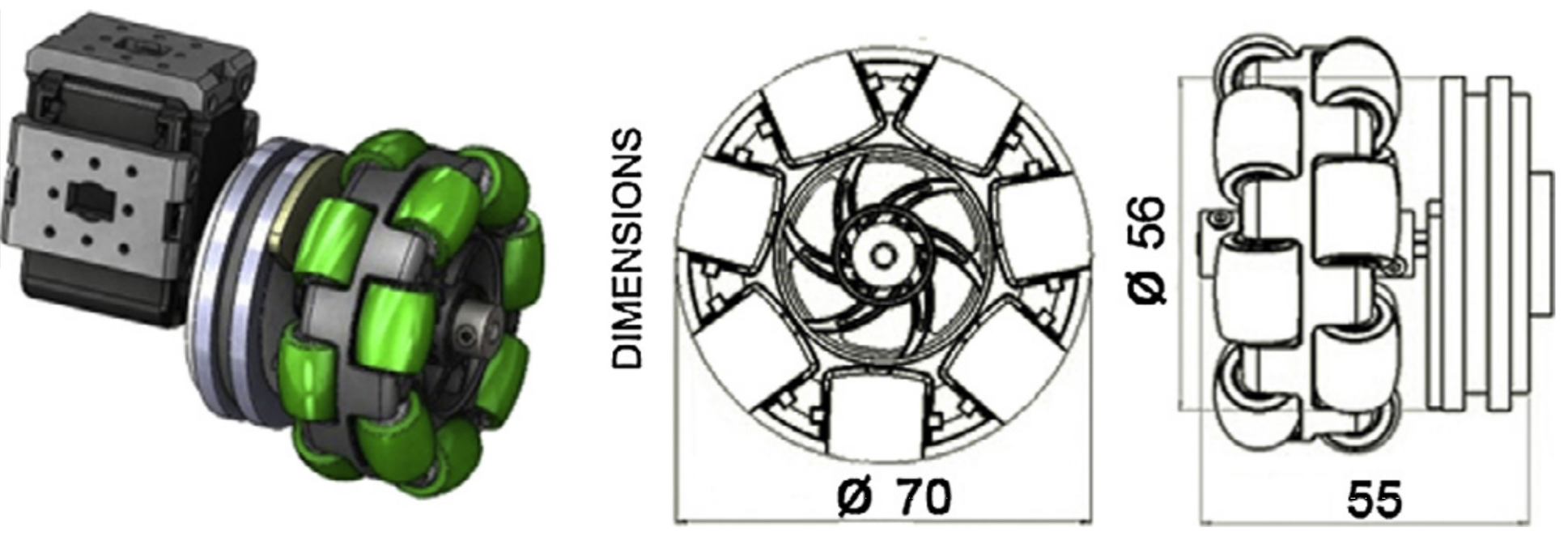
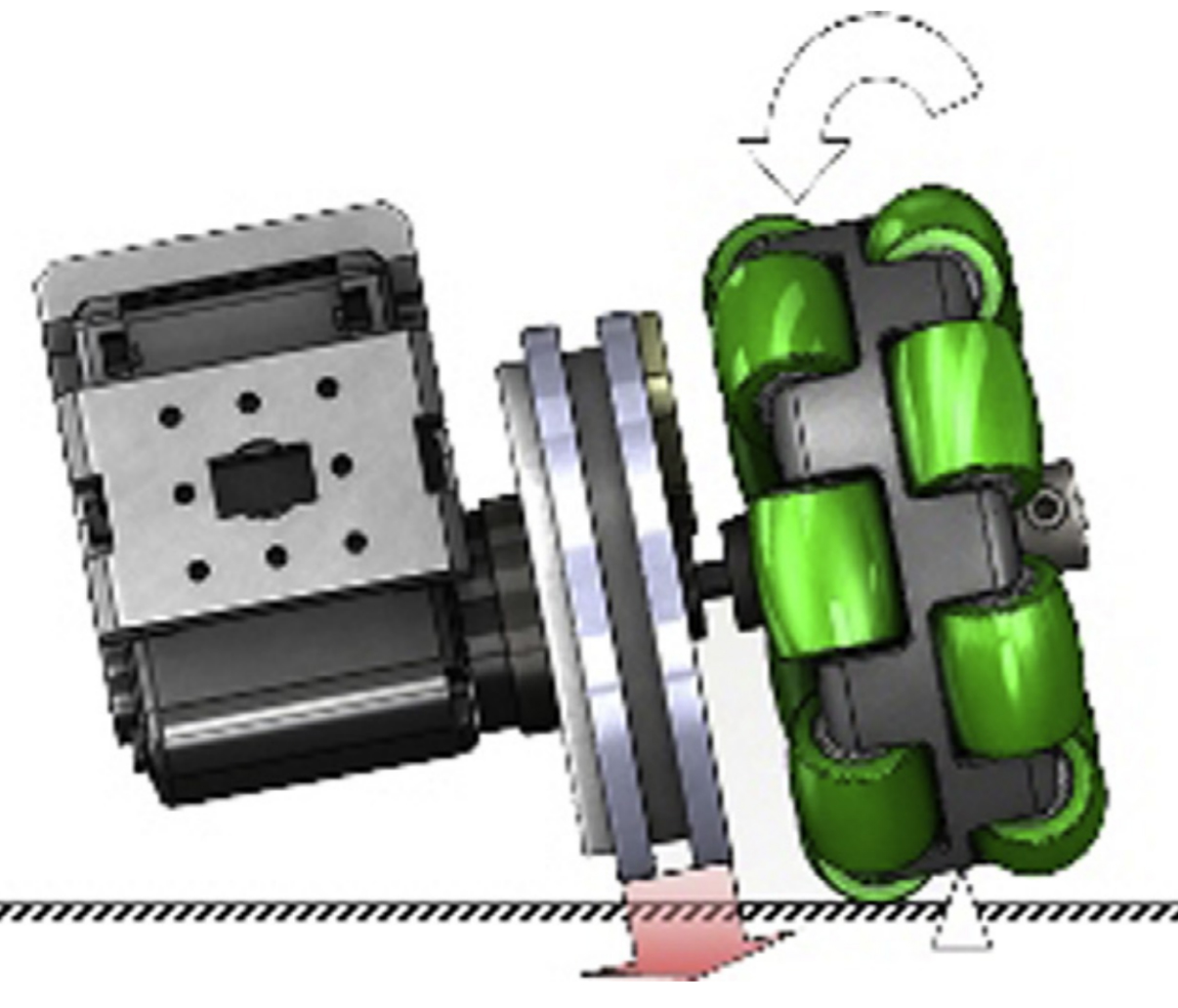
3rd generation of magnetic omnidirectional wheels.
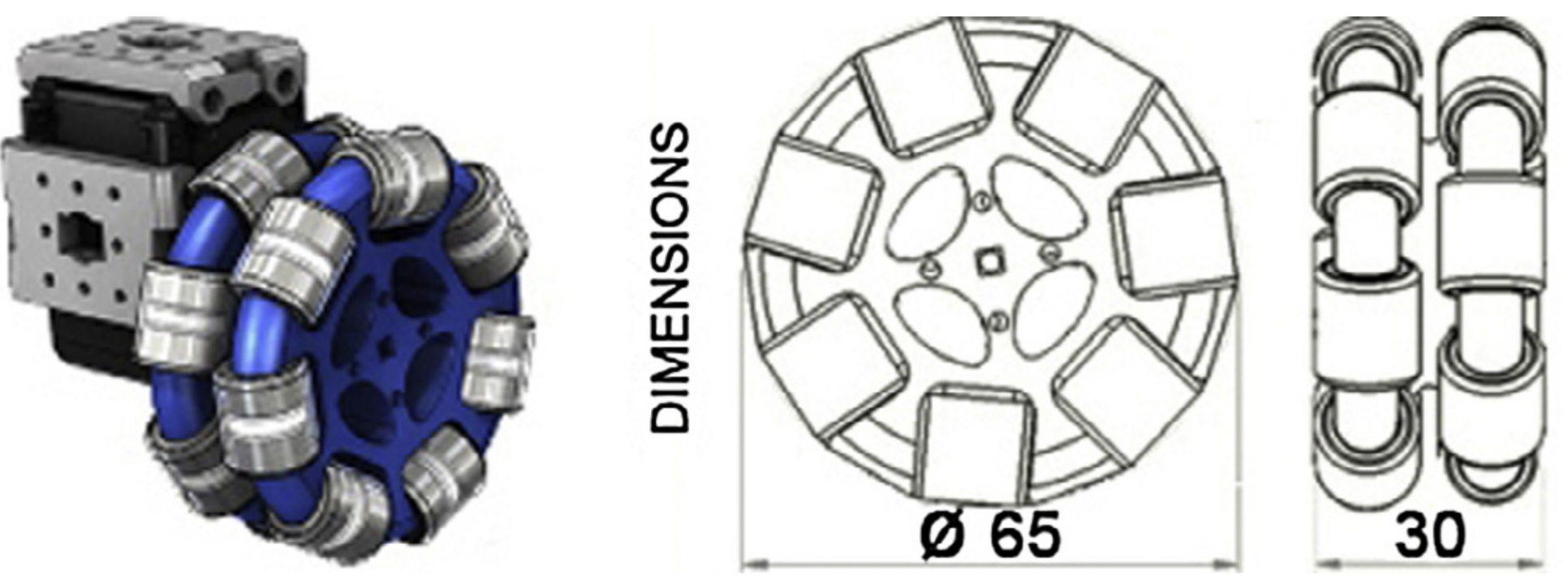
Design of the 4th generation of magnetic wheels.
Magnetic Omnidirectional Wheels for Climbing Robots
M. Tavakoli, C. Viegas, L. Marques, J. N. Pires and A. T. de Almeida, “Magnetic omnidirectional wheels for climbing robots,” 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, 2013, pp. 266-271.
doi: 10.1109/IROS.2013.6696363