

Carbon doped PDMS:
People involved:
- Mahmoud Tavakoli
- Rui Rocha
- Luis Osorio
- Miguel Almeida
- Anibal De Almeida
- Vivek Ramachandran
- Arya Tabataba
- Tong Lu
- Carmel Majidi
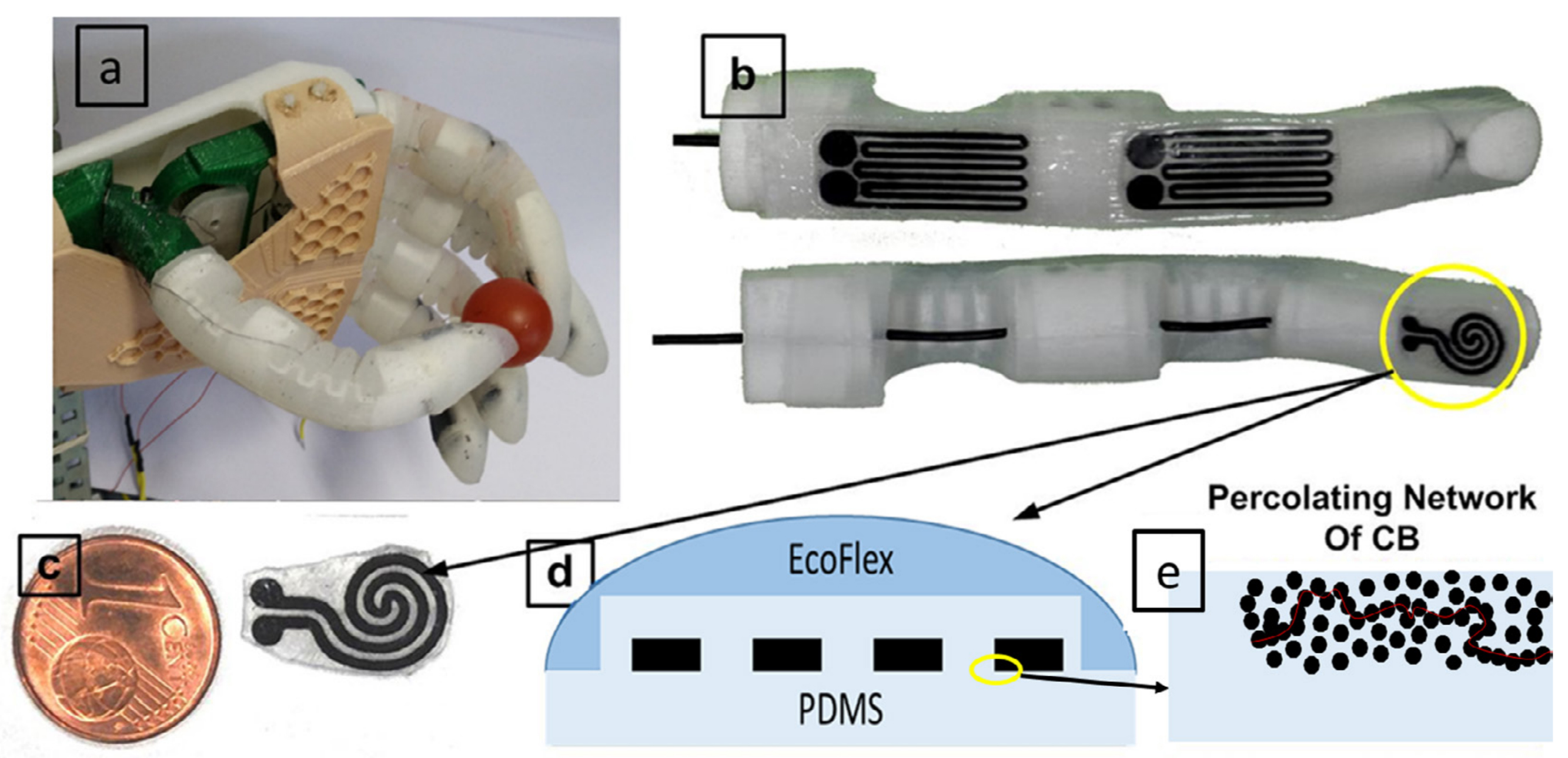
(a) The new version of the ISR-Softhand with embedded pressure sensors. (b) Soft elastomeric fingers with all elastomer pressure and bending sensors. (c) An example of a pressure sensor before integration into the hand. (d) The sensor is composed on patterned cPDMS sandwiched between layers of PDMS and is then embedded in an EcoFlex substrate. (e) Percolating networks of CB inside the PDMS assures conductivity of the cPDMS traces.

Molds used to make the cPDMS patterns. (a) Acrylic mold made using a laser-cutting machine (‘S’ refers to the laser speed and ‘P’ to its power) to engrave patterns with dimensions ( ) 1.5, 3 × ( ) 0.35, 0.4, 0.6, 0.9 mm. (b) Mold made in the back of a PCB using a CNC to engrave the patterns. (c) Acrylic mold made using a laser-cutting machine to engrave patterns with dimensions ( ) 0.6 × ( ) 0.25, 0.3, 0.4 mm. (d) Close-up of a spiral pattern. (e) Mold made from a 0.1mm stainless steel sheet (stencil).
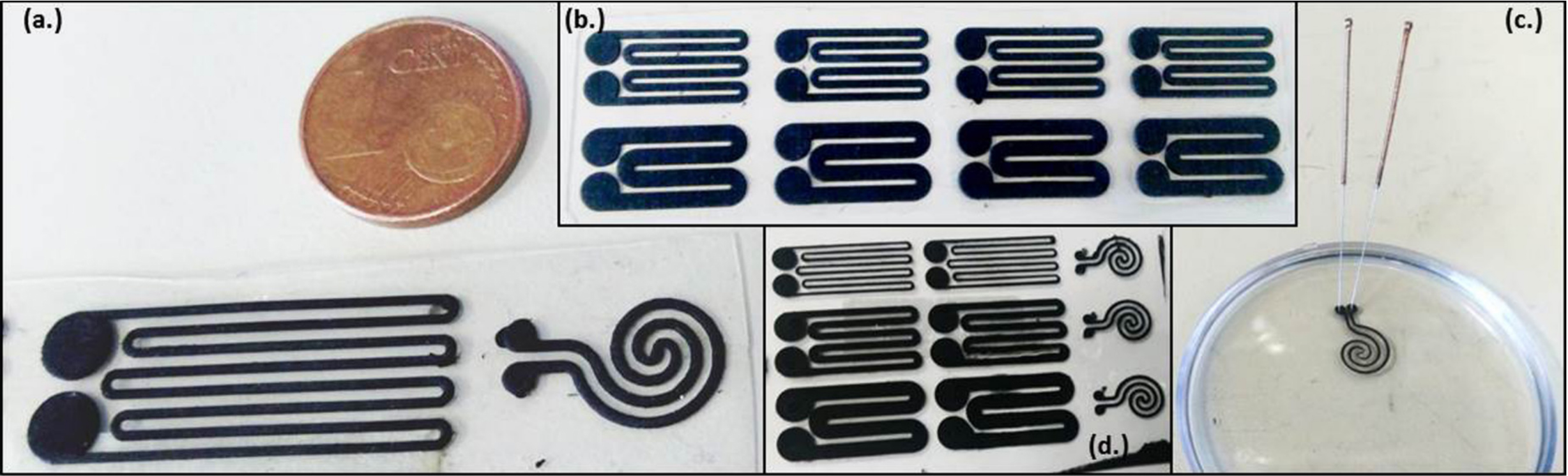
Examples of the produced samples. (a) Close-up of the two types of samples tested. (b) Conductive traces developed in acrylic molds. (c) Measuring the resistance of a spiral sample using a pair of acupuncture needles. (d) Electrodes made using the CNC-milled PCB (notice the irregularities on the cPDMS tracks).
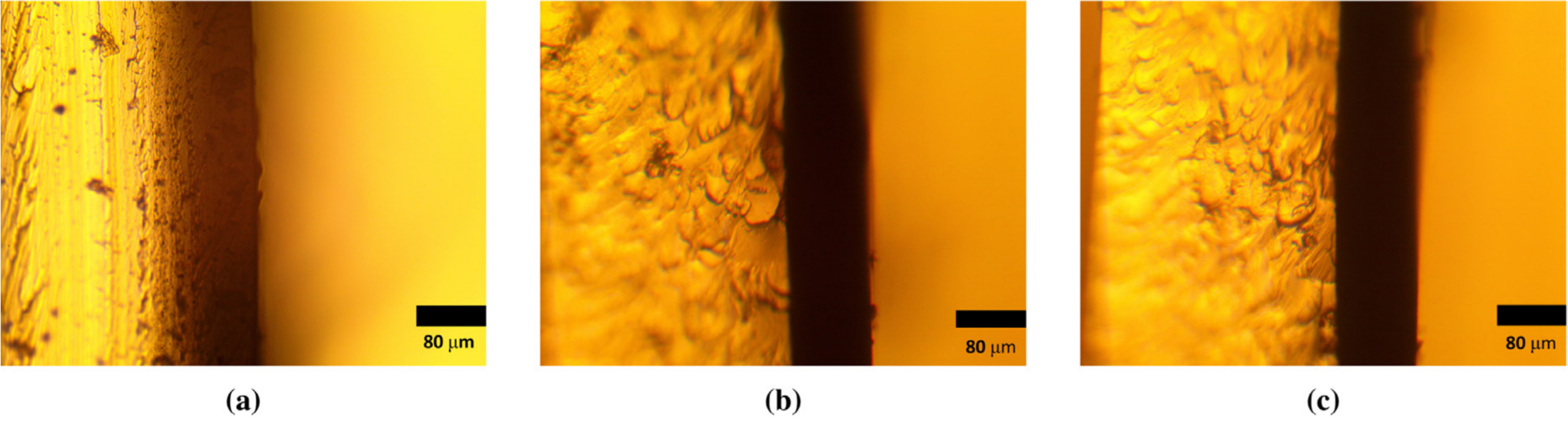
Cross-section images from different curing methods for samples with 1 wt% of CB. (a) Curing method 2, (b) curing method 4 and (c) curing method 6.

SML 3D printer with extrusion-based syringe deposition. Legend: (1) DC stepper motors; (2) syringes; (3) Arduino Mega;
(4) motherboard (Ramps 1.4); (5) mechanical end-stop microswitches; (6) heated printing bed; (7) power supply
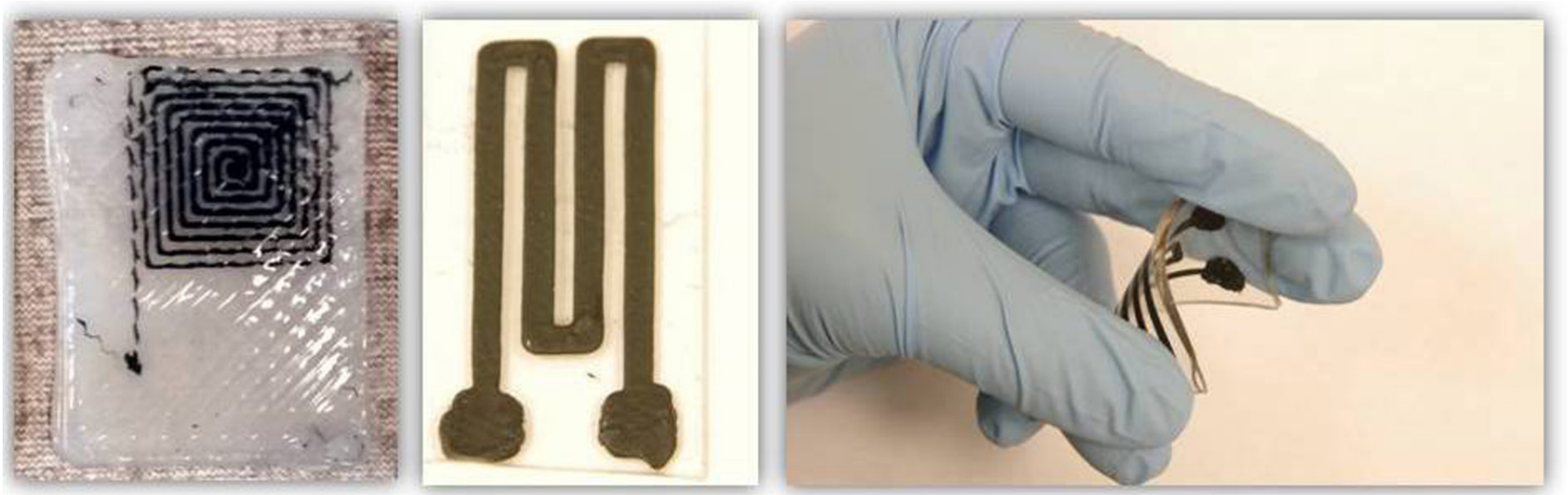
Sample prints of soft electronics with carbon based cPDMS achieved by the SML 3D Printer.
Carbon doped PDMS: Conductance stability over time and implications for additive manufacturing of stretchable electronics
Mahmoud Tavakoli et al 2017 J. Micromech. Microeng. 27 035010