

Flexirigid, a novel two phase flexible gripper.
People involved:
- Mahmoud Tavakoli
- Lino Marques
- Anibal T De Almeida
This paper introduces a novel grasping mechanism that combines caging and force closure approaches in order
to grasp an object. The main advantage of the gripper is its adaptability to various object shapes and sizes with low DOF. The two DOF gripper takes advantage of two tendon driven trunks. Inspired from the continuum manipulator concept, the trunks do not include discrete joints and rather an elastomer plays the role of the joints. The tendon driven trunks in the first phase of grasping act as rigid links and in the second phase act as flexible mechanisms. Two prototype of the gripper are developed, tested and evaluated. The under-actuated prototypes showed a very good adaptability to different object shapes and sizes.
Farmers encircle their hands around the tree and use a support belt in order to climb trees.
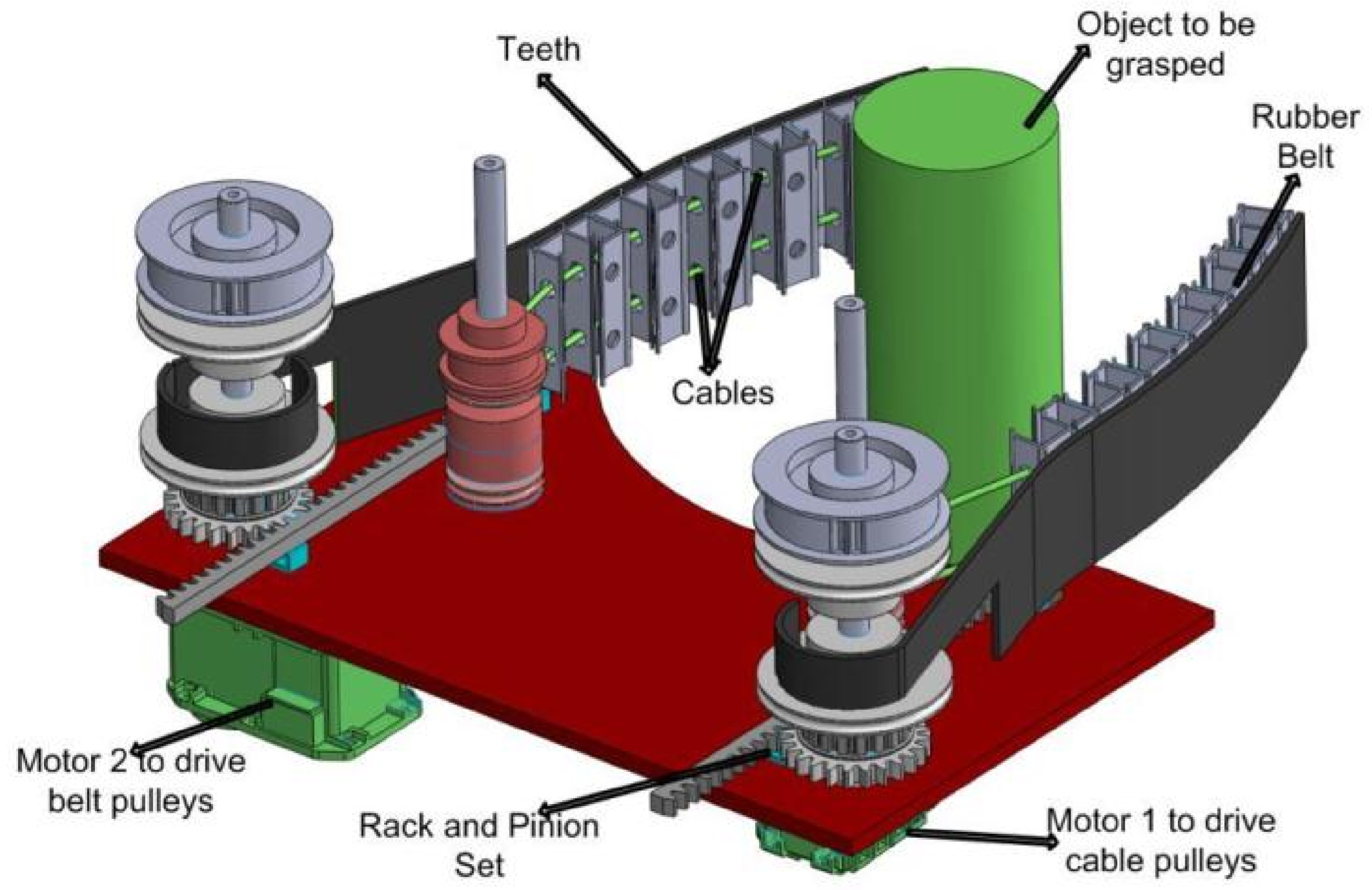
Model of the Flexirigid gripper.
The working principal of the Flexirigid gripper.
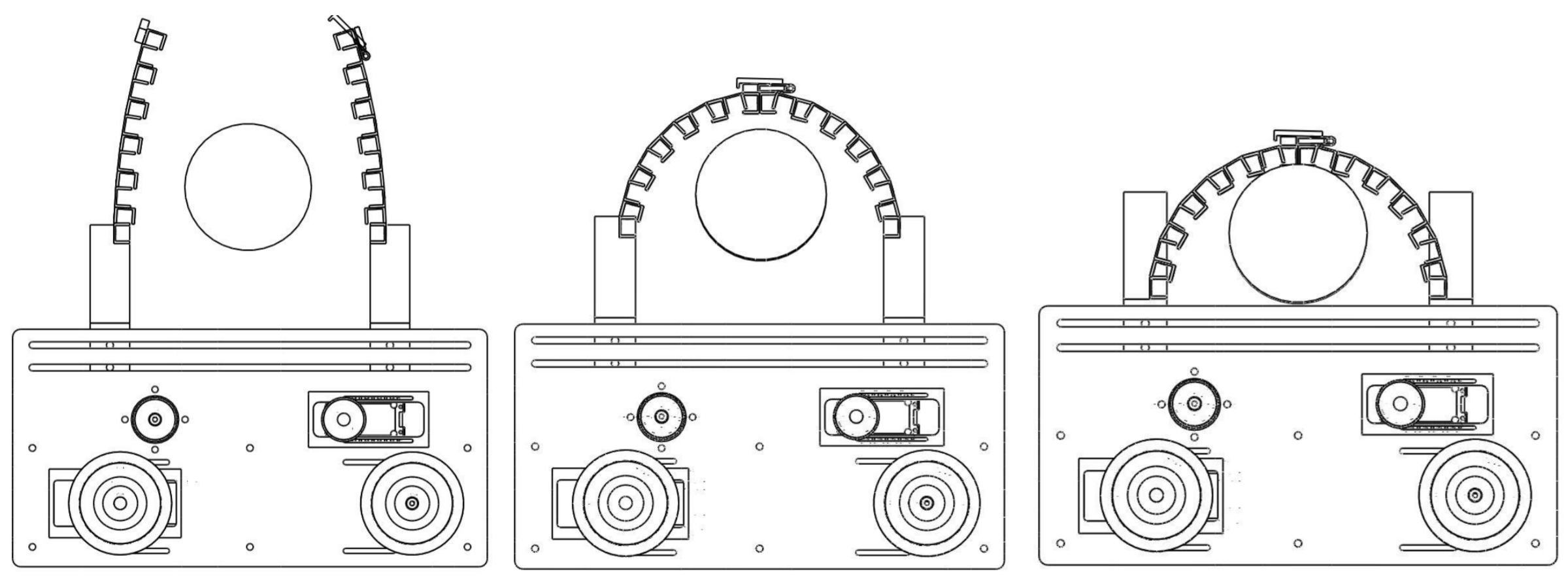

Grasping stages of a cylindrical object with a diameter of 50mm.

The 3d model and dimensions of the second prototype of the gripper.

The first prototype of the gripper can grasp cylindrical objects with different sizes and non cylindrical objects with different profile shapes.

Grasping a circular profile by flexirigid gripper. a: Before grasping b: Tendons are pulled around the pulley and trunks are locked. After locking, tendons are released, so that the trunks gain their flexibility again. c: Retraction of trunks by RX64 actuator and grasping d:Unlocking

Flexirigid gripper could adapt to a variety of object profiles due to its flexibility and could successfully grasp them. Images show the status of the gripper before and after retraction of the trunks.
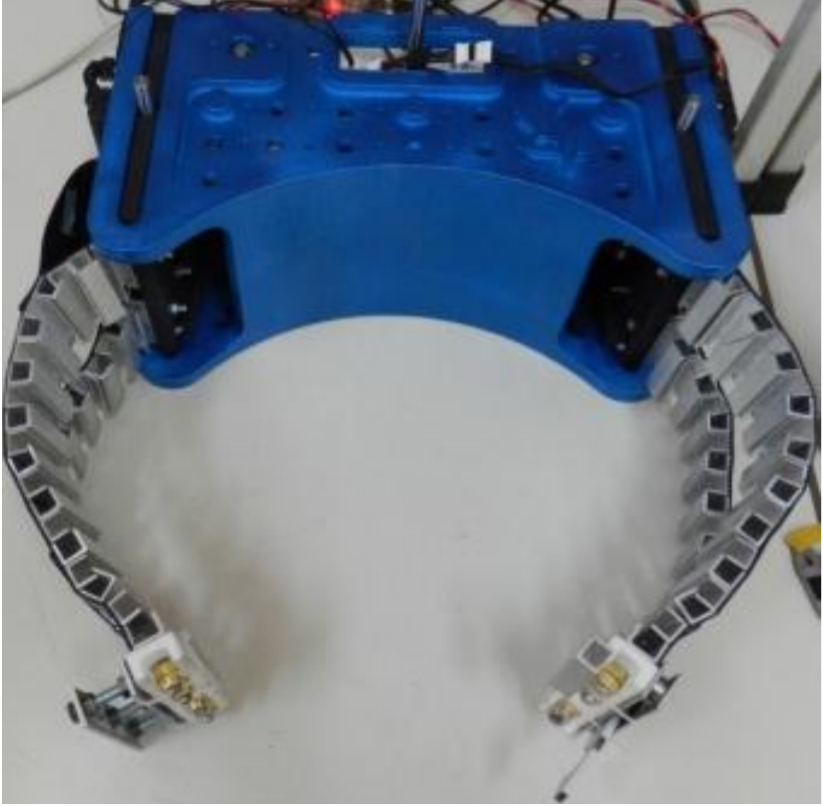
The actual implementation of the Flexirigid gripper.
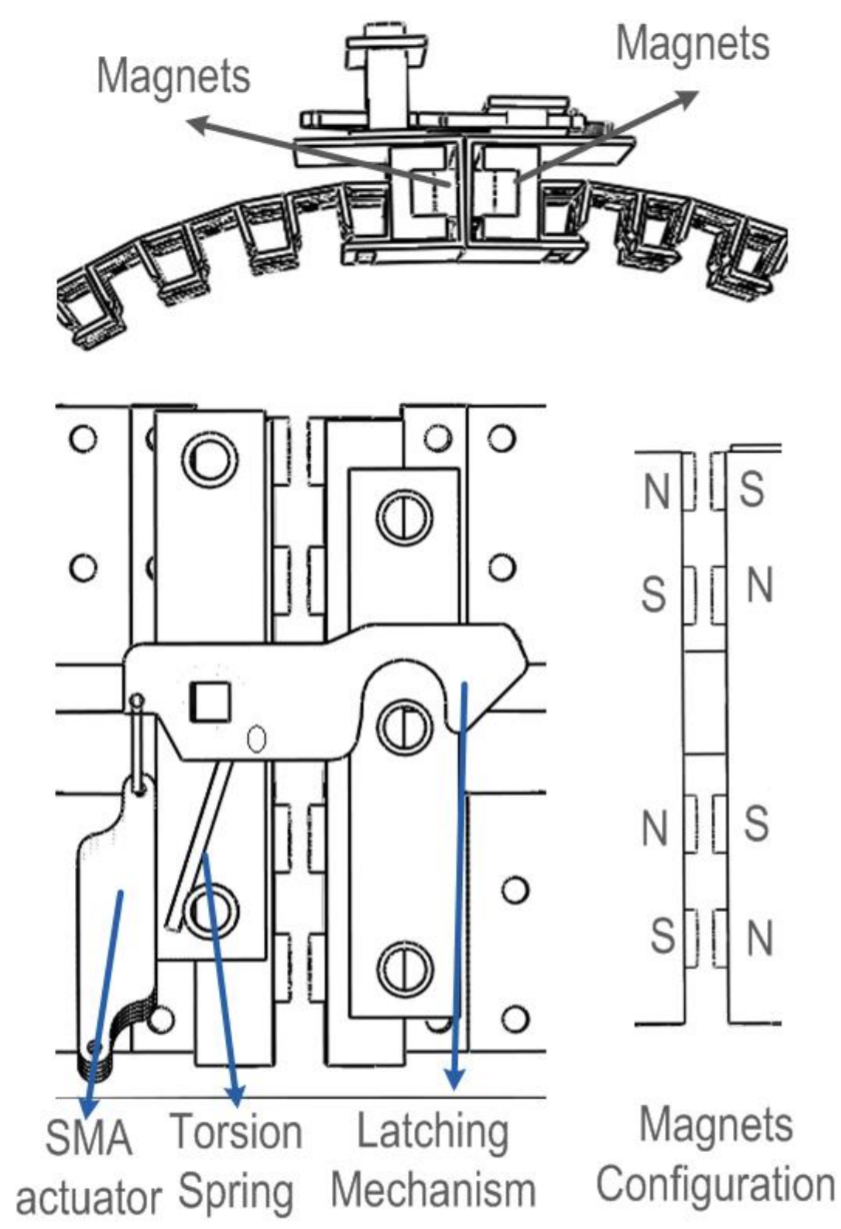
The locking mechanism consist of a configuration of magnets and a latching mechanism, and a SMA actuator for unlocking.

Adaptation to and grasping of several objects.
Two different approaches for grasping two objects. The second approach (right picture) is by active control of each trunk to form it close to the object’s profile.

Flexirigid, a novel two phase flexible gripper
M. Tavakoli, L. Marques and A. T. de Almeida, “Flexirigid, a novel two phase flexible gripper,” 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, 2013, pp. 5046-5051.
doi: 10.1109/IROS.2013.6697086