

InchwormClimber:
People involved:
- José Carlos Romao
- Mahmoud Tavakoli
- Carlos Viegas
- Pedro Neto
- Aníbal T de Almeida
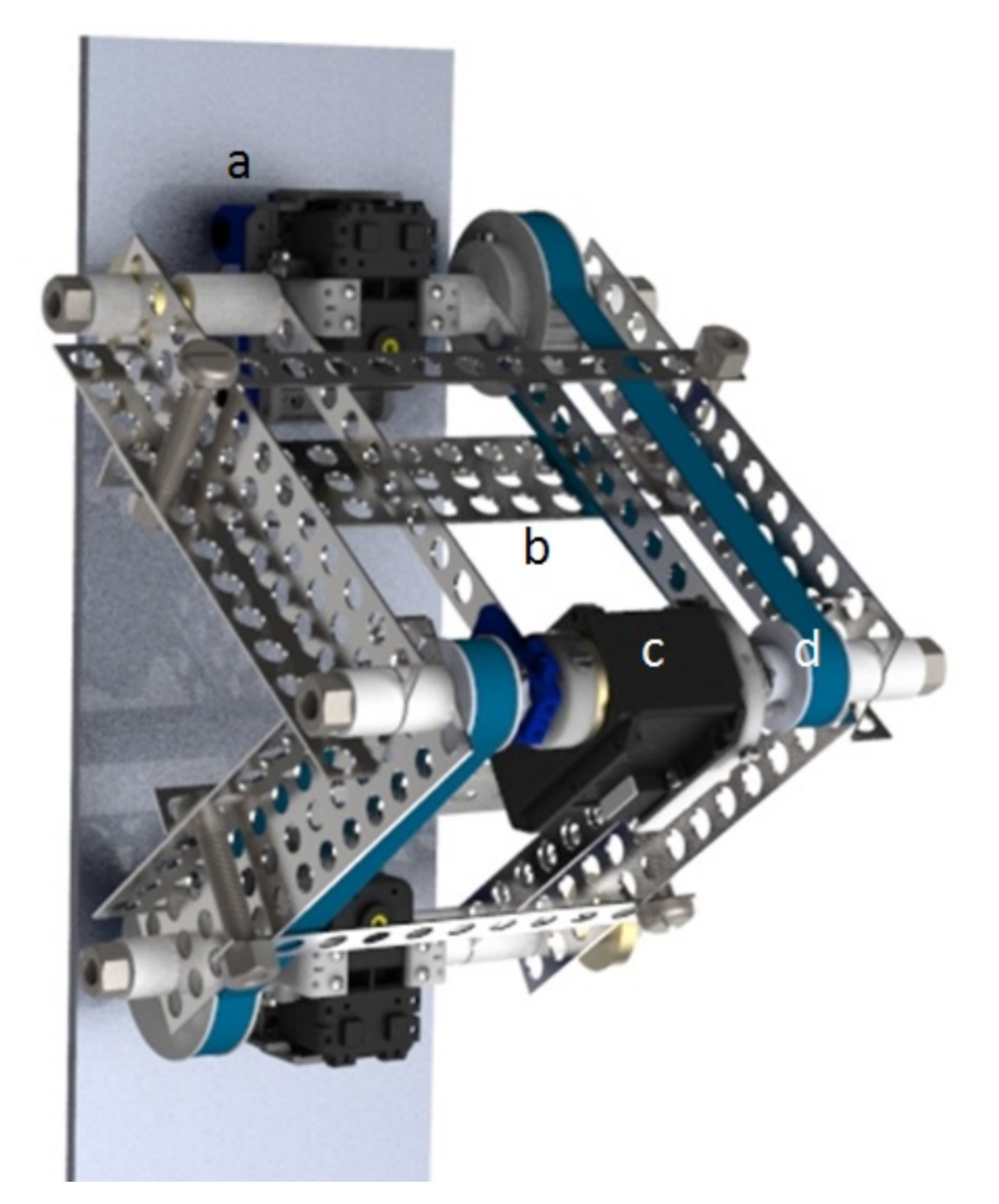
InchwormClimber: a- Adhesion Unit with actuator, b- transverse bar, c- climbing mechanism actuator, d- pulley and belt.
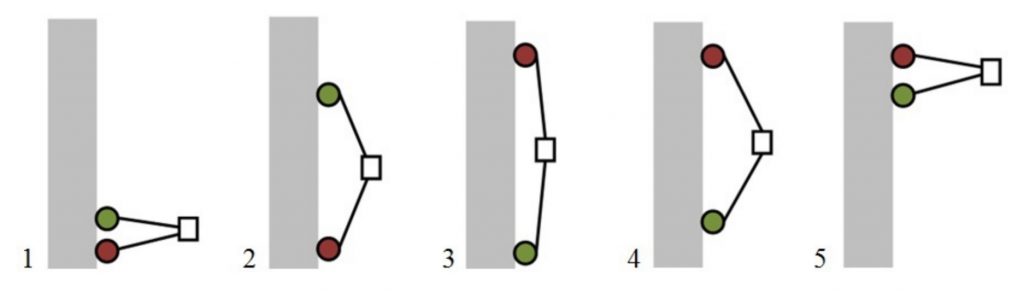
InchwormClimber locomotion (red indicates the adhesion units magnet is on, providing maximum adhesion force, while green means its off): 1- Beginning of step, the robot is at minimum extension, 2- the climbing mechanism actuator drives the links in order to depart from each other, 3- the robot reaches its maximum extension, the adhesion units change their status in turn 4- the climbing mechanism actuator turns in an opposite direction and the links approach each other, 5- the robot is again at minimum extension.
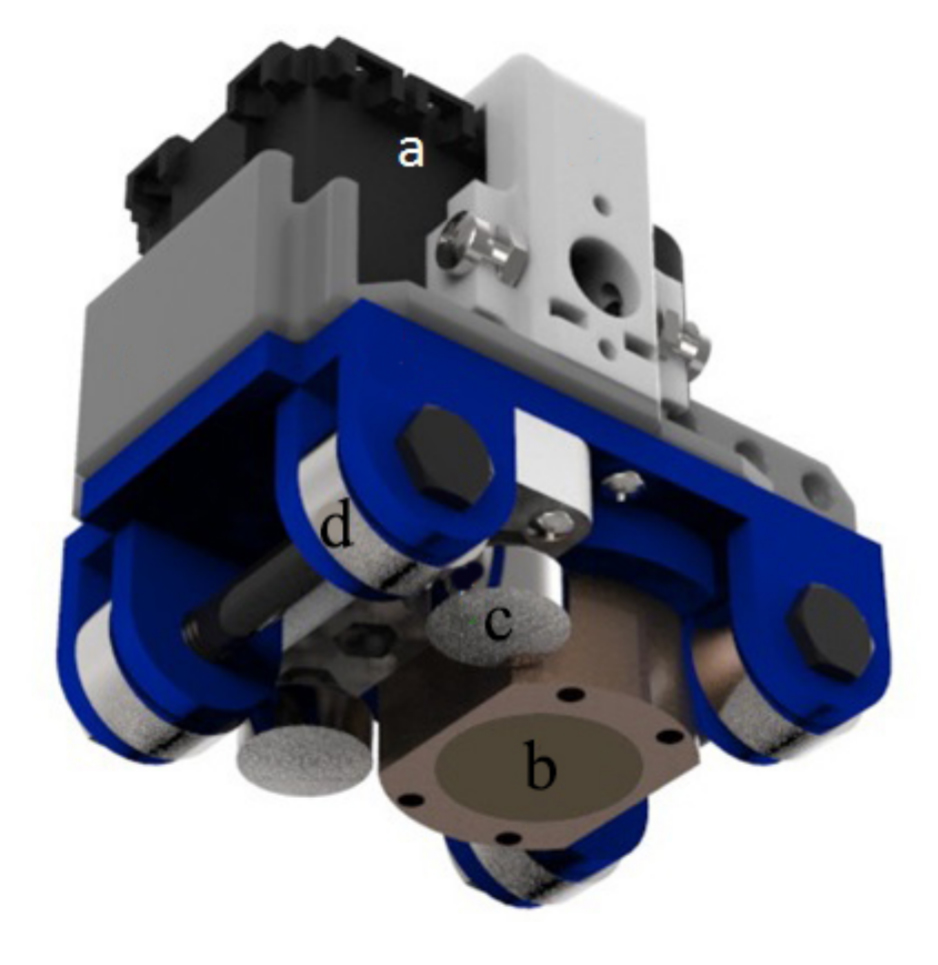
Adhesion unit: a- AX-12 actuator, b- switchable magnet, cpermanent magnet, d- bearing.
InchwormClimber: A light-weight biped climbing robot with a switchable magnet adhesion unit.
J. C. Romão, M. Tavakoli, C. Viegas, P. Neto and A. T. de Almeida, “InchwormClimber: A light-weight biped climbing robot with a switchable magnet adhesion unit,” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, 2015, pp. 3320-3325.
doi: 10.1109/IROS.2015.7353839