

Switchable magnets for robotics applications.
People involved:
- Mahmoud Tavakoli
- Carlos Viegas
- José Carlos Romao
- Pedro Neto
- Aníbal T de Almeida
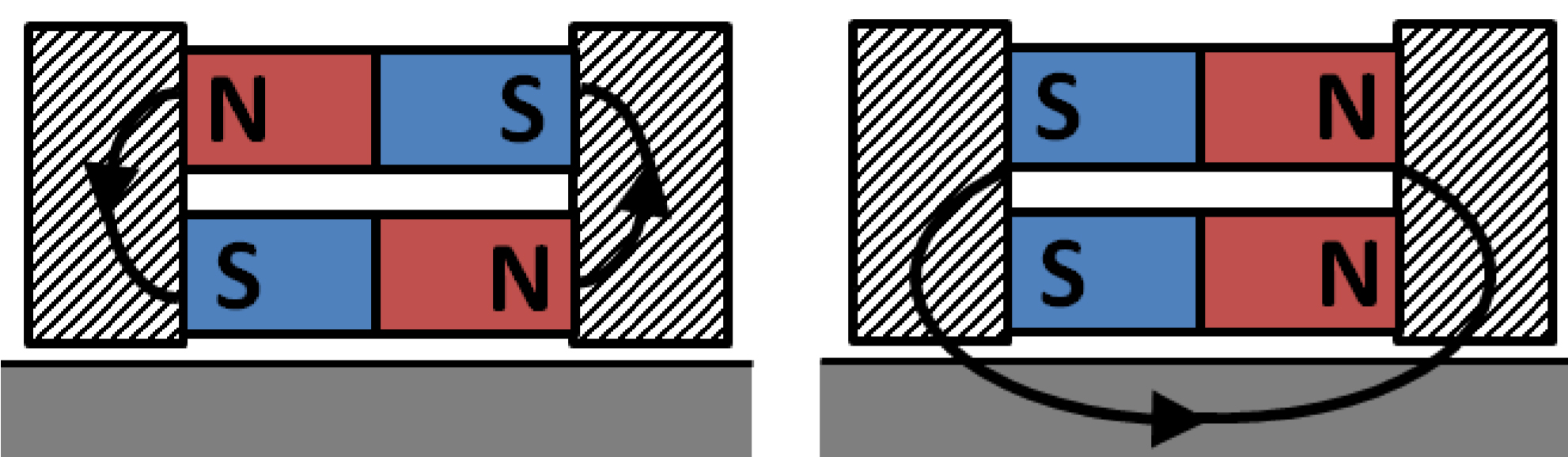
H-type SM. When off the magnetic flux closes between the two magnets. Rotating the upper magnet 180°brings the magnets into the pole alignment and the magnetic flux follows a path outside of the device.

Model range of the MagJig models from Magswitch (the model number relates to the holding force in pounds).
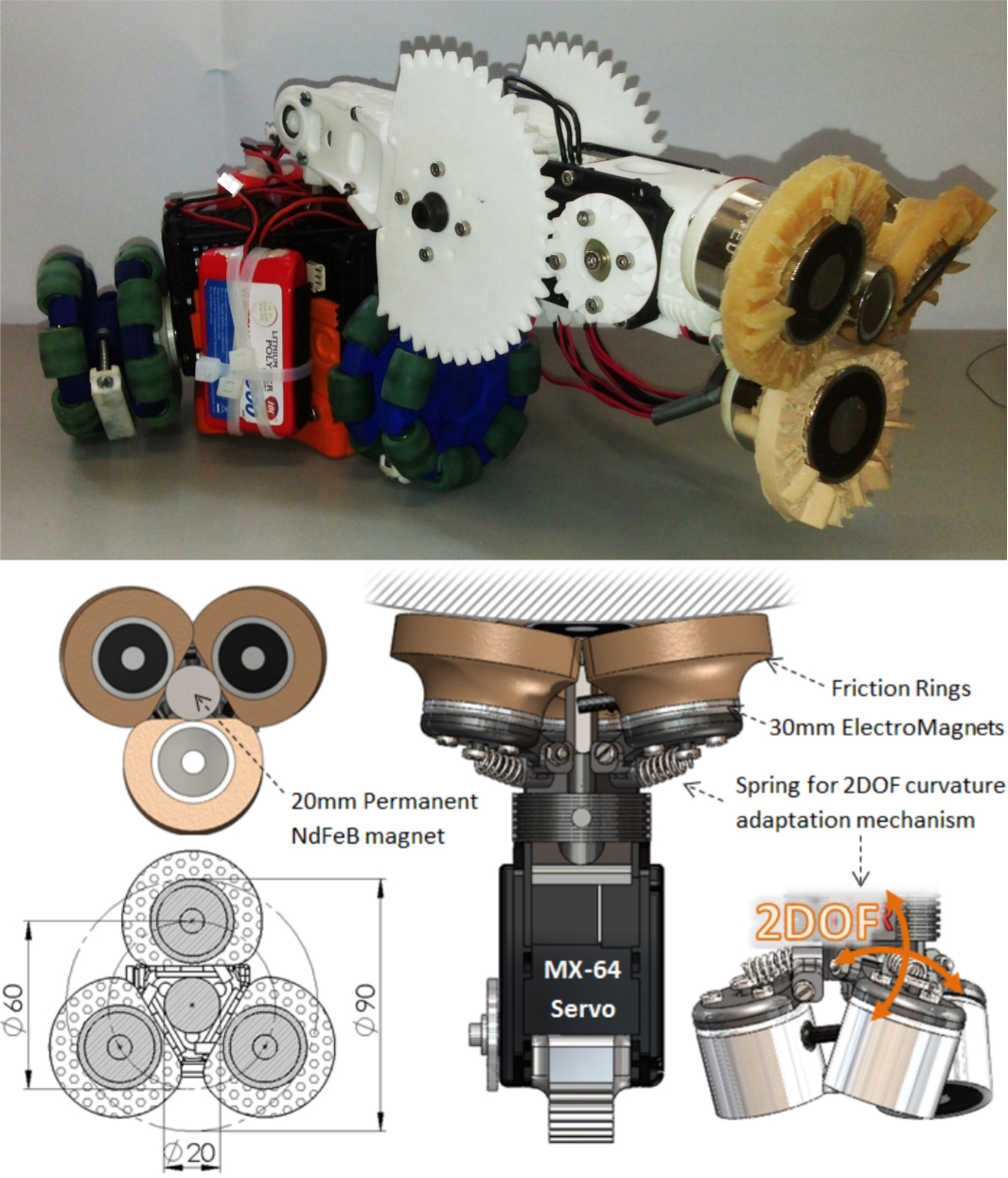
OmniClimber uses three omnidirectional magnetic wheels to achieve omnidirectional movement on ferromagnetic structures. It uses an attachment unit (shown below) composed of three electromagnets and a single DOF arm to transit between perpendicular planes.
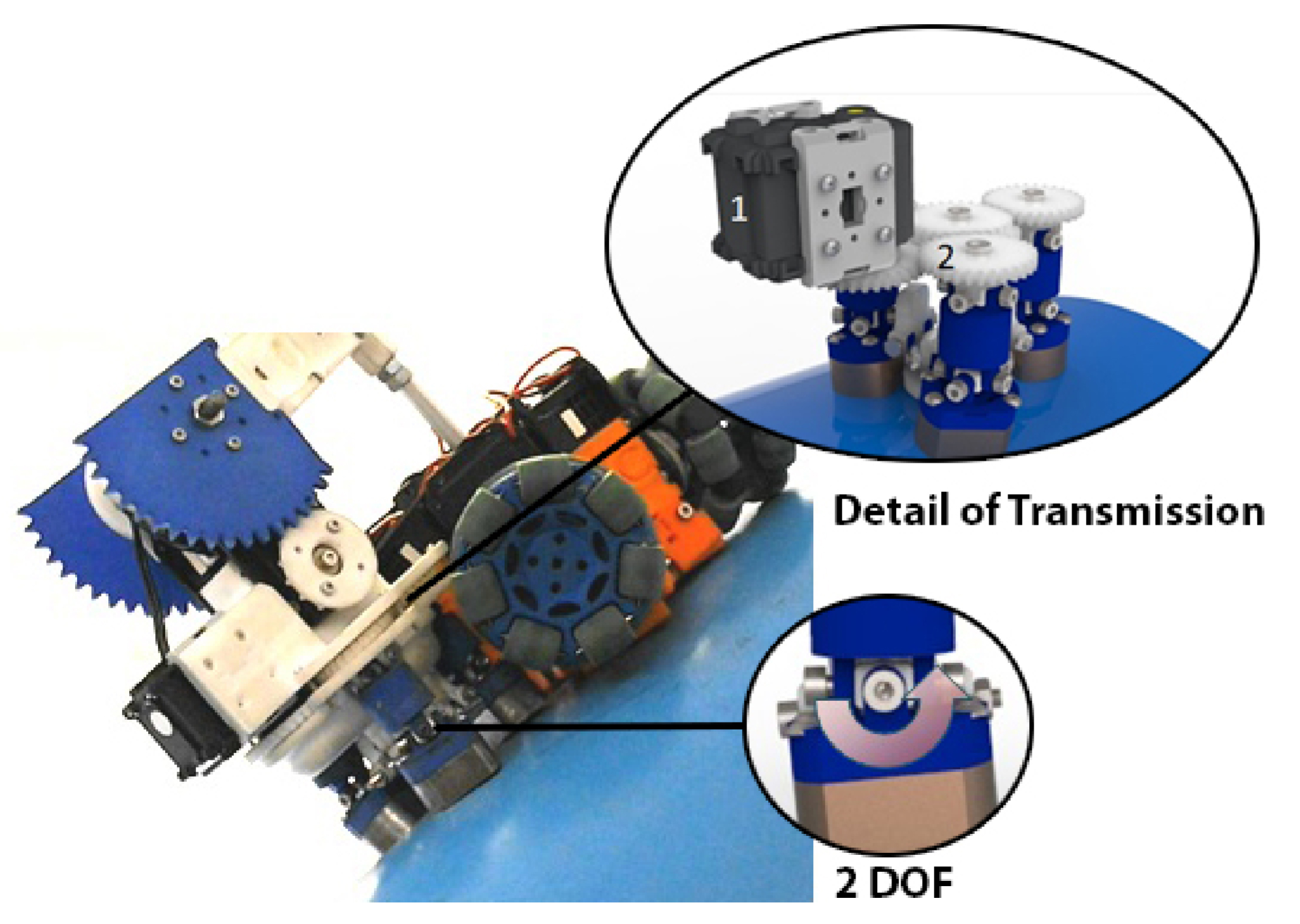
Novel attachment unit using SM, showing the detail of the transmission mechanism (Actuator (1) and transmission gears (2)) and the degrees of freedom accomplished by the transmission axle of the SMs.
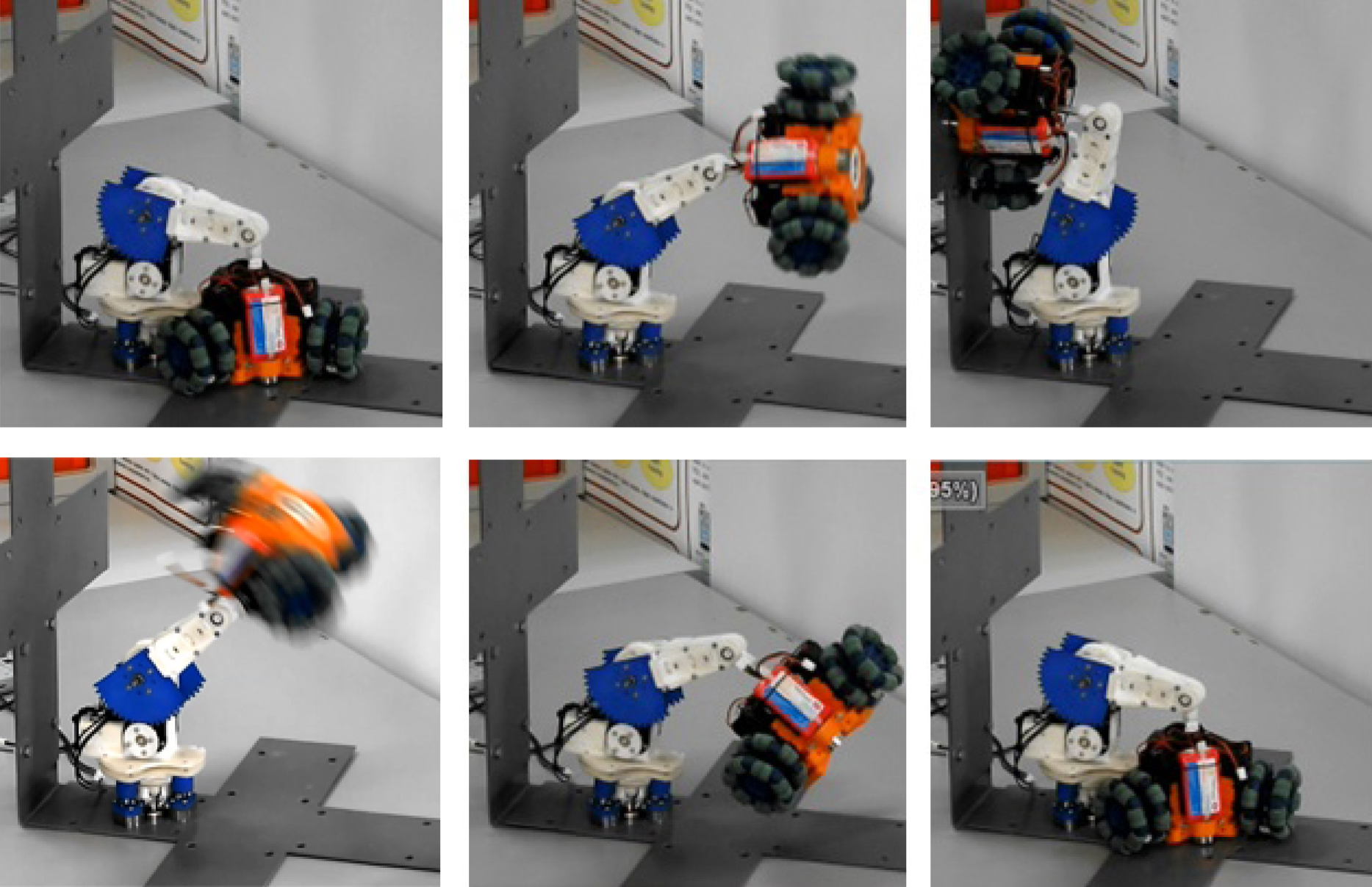
Plane transition: from the initial position, with the center of the OmniClimber 13.5 cm away from the wall, the robot is raised, then the OmniClimber is fixed to the wall by a permanent magnet (above sequence), after it is lowered down by the arm, and it is again on initial position (below sequence).
Switchable magnets for robotics applications.
M. Tavakoli, C. Viegas, J. C. Romão, P. Neto and A. T. de Almeida, “Switchable magnets for robotics applications,” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, 2015, pp. 4325-4330. doi: 10.1109/IROS.2015.7353990