

Motion control of an omnidirectional climbing robot based on dead reckoning method.
People involved:
- Mahmoud Tavakoli
- Pedro Lopes
- Lucio Sgrigna
- Carlos Viegas
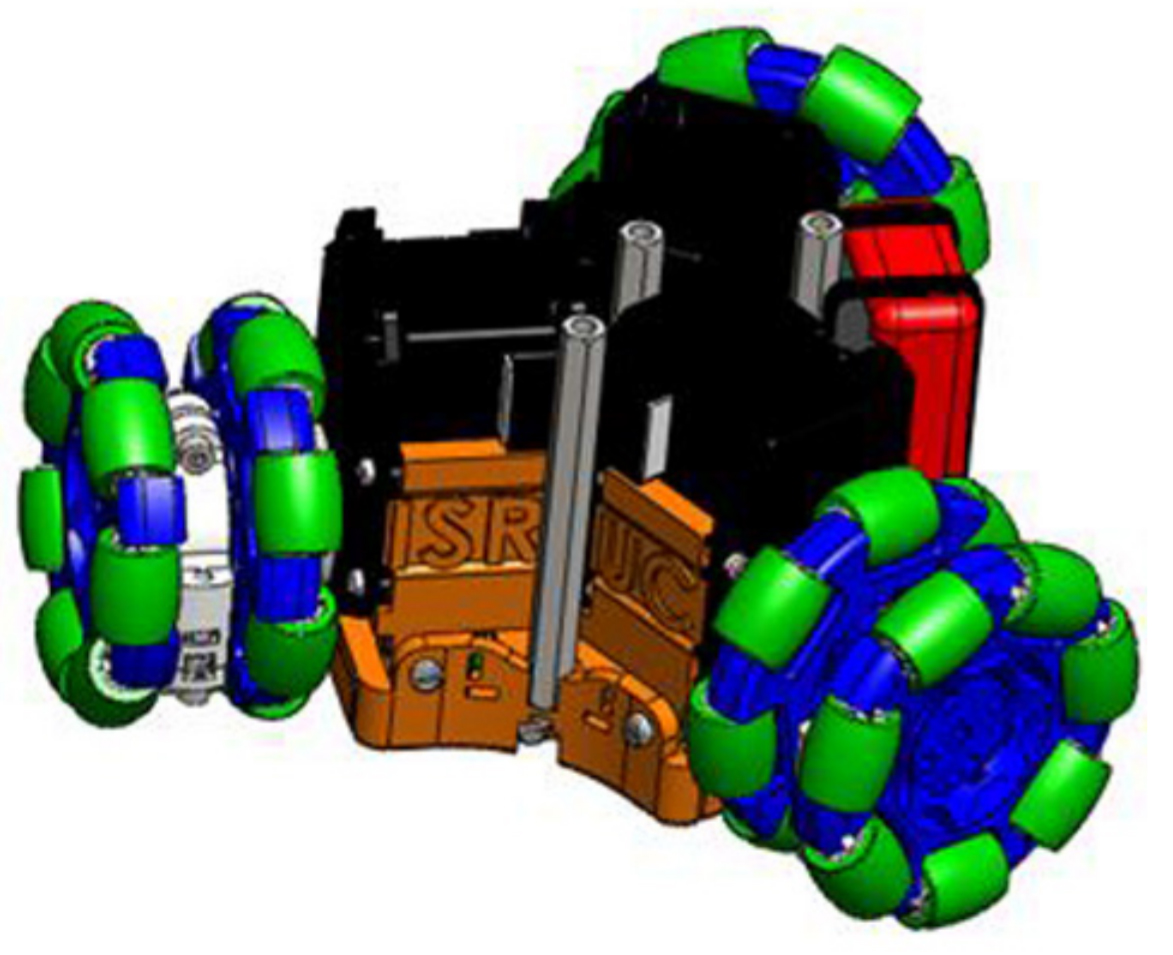
OmniClimber-VI.
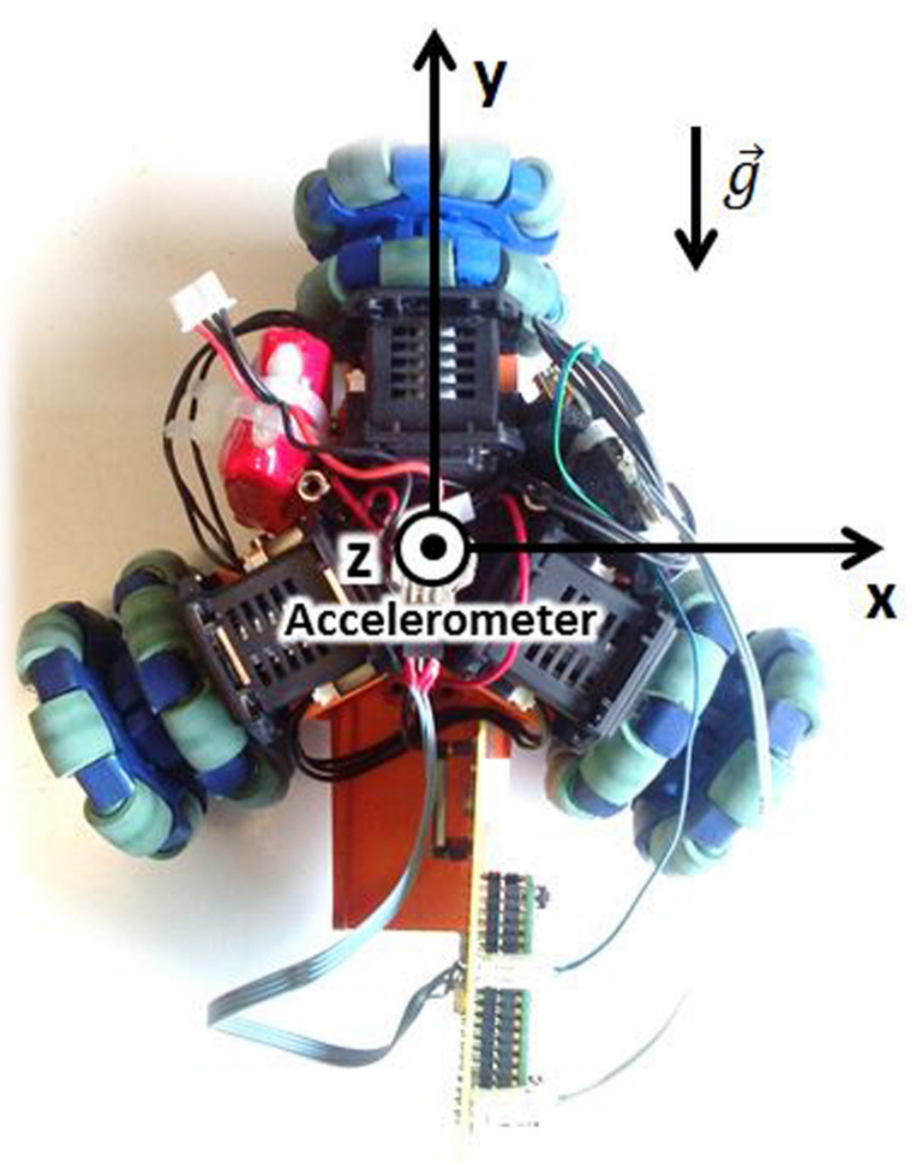
Reference axis on the robot.
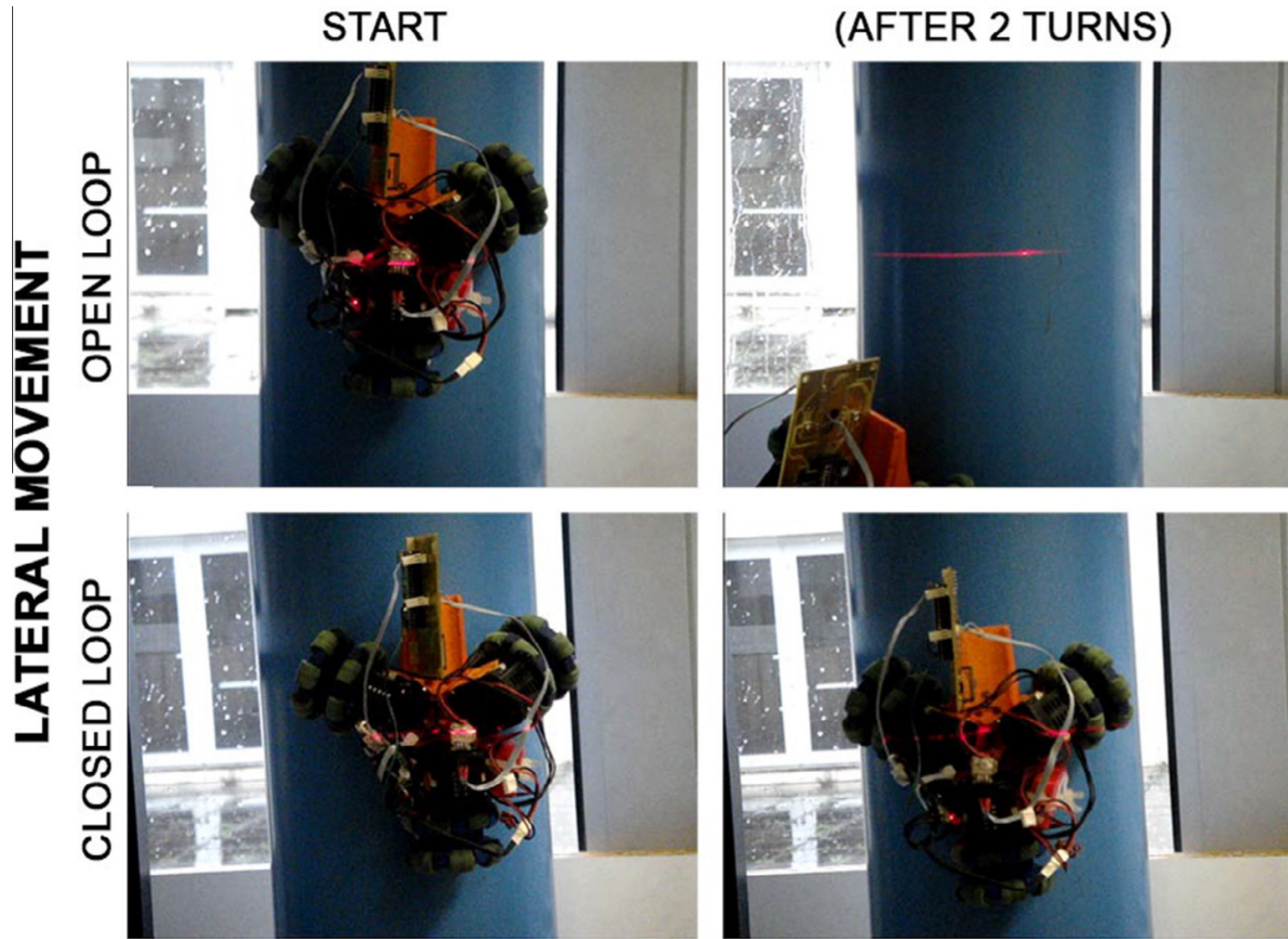
Snapshots from the Omniclimber experiments on a pole of 220 mm diameter, without and with the orientation control. Rotating around the pole while keeping the robots orientation constant.
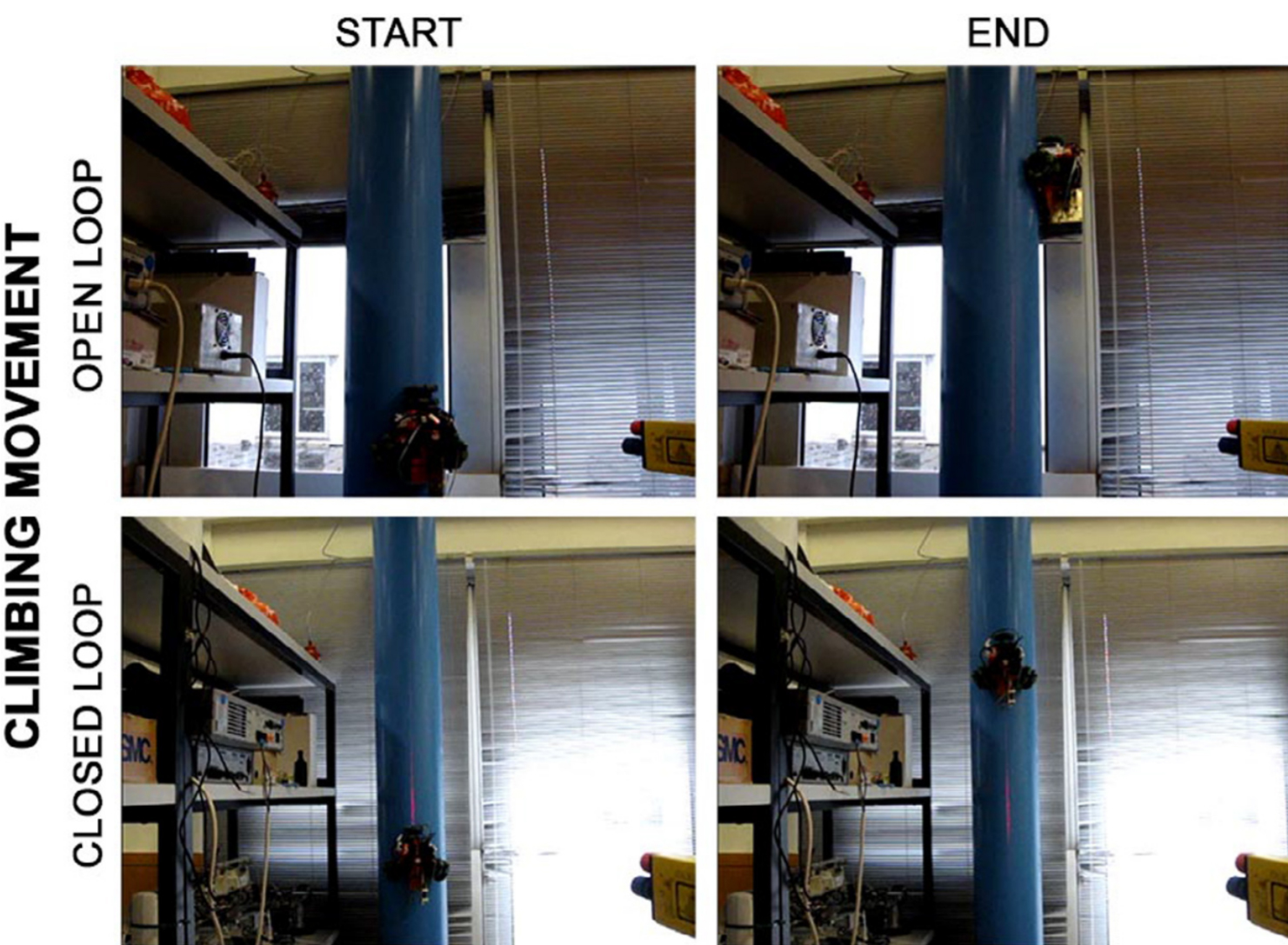
Snapshots from the Omniclimber experiments moving vertically parallel to the pole axis on a pole of 220 mm diameter, with and without the orientation control.
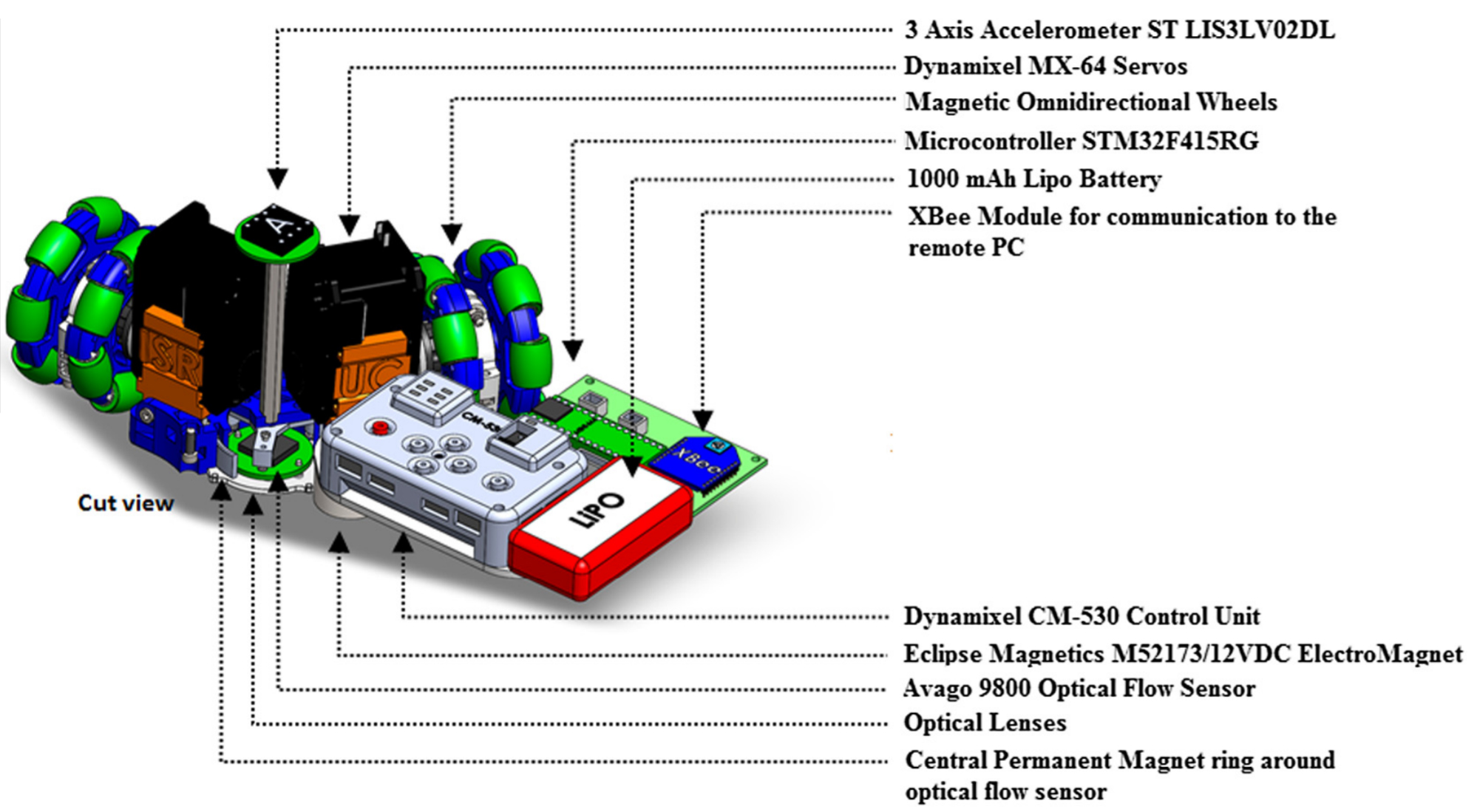
Schematics of the mechatronics components and sensors integrated on the Omniclimber.
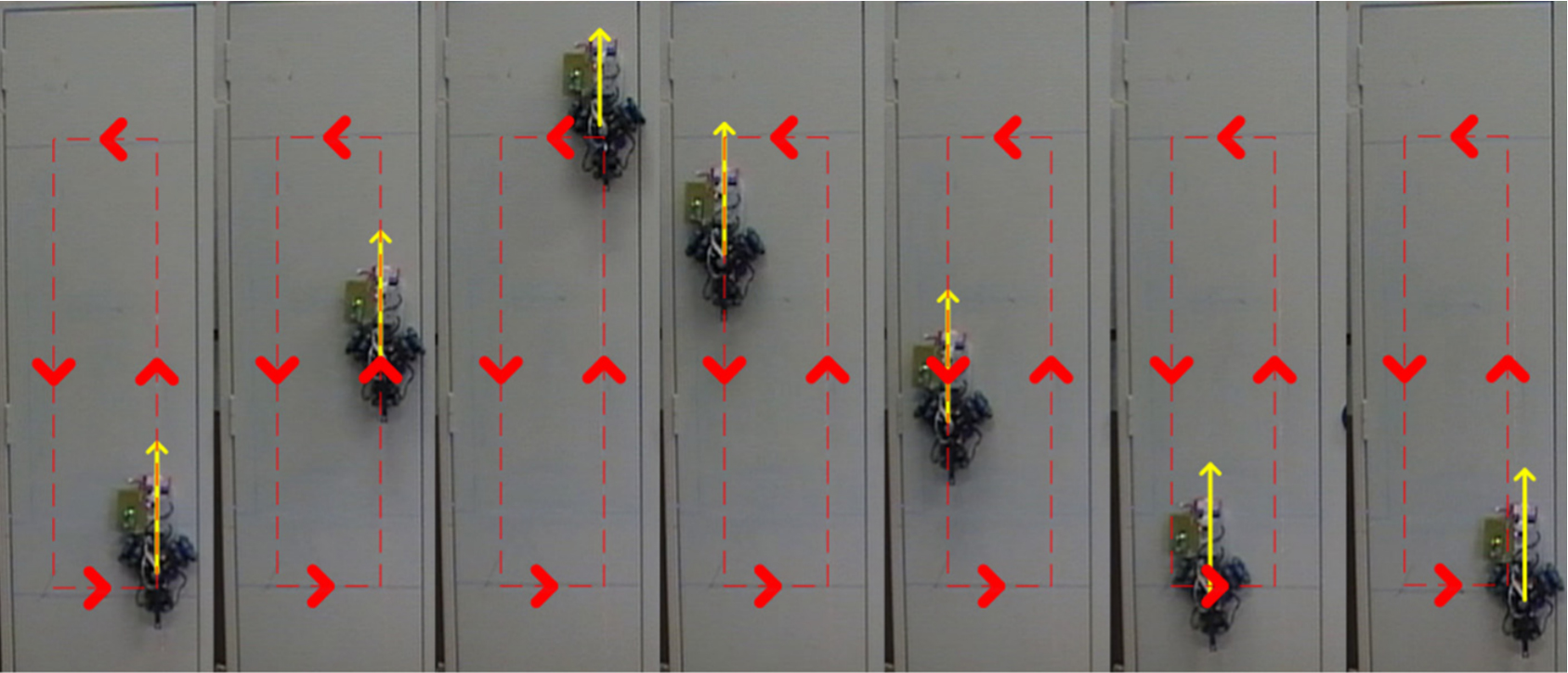
Snapshots of one experiment on the flat surface in mode 3, to follow a rectangular shape with dimensions of 1000 250 mm; Yellow arrow – Robot heading direction; Red arrows – Direction of movement. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
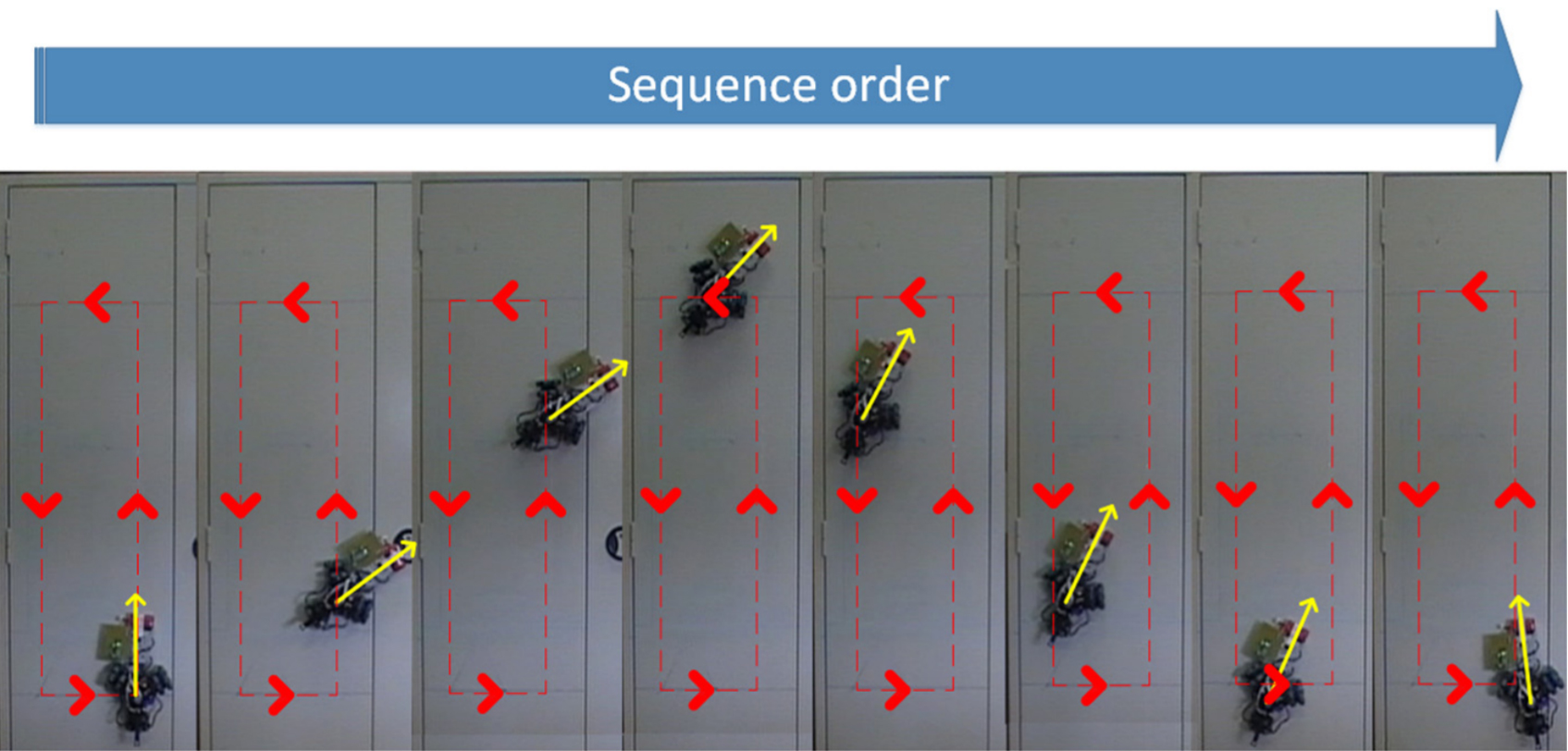
Snapshots of one experiment on the flat surface in mode 4, to follow a rectangular shape with dimensions of 1000 250 mm; Yellow arrow – robot heading direction; Red arrows – direction of movement. (For interpretation of the references to color in this figure legend, the reader is referred to the web version of this article.)
Motion control of an omnidirectional climbing robot based on dead reckoning method
reference missing