

OmniClimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures.
People involved:
- Mahmoud Tavakoli
- Carlos Viegas
- Lino Marques
- J Norberto Pires
- AníBal T De Almeida
This paper introduces Omniclimber, a new climbing robot with high maneuverability for inspection of ferromagnetic flat and convex human made structures. In addition to maneuverability, adaptability to various structures with different curvatures and materials are addressed. The conceptual and detailed design of Omniclimbers are presented and two prototypes of the robot are introduced. Several laboratory and field tests are reported, and the results are discussed.
Schematic of the curvature adapting system.
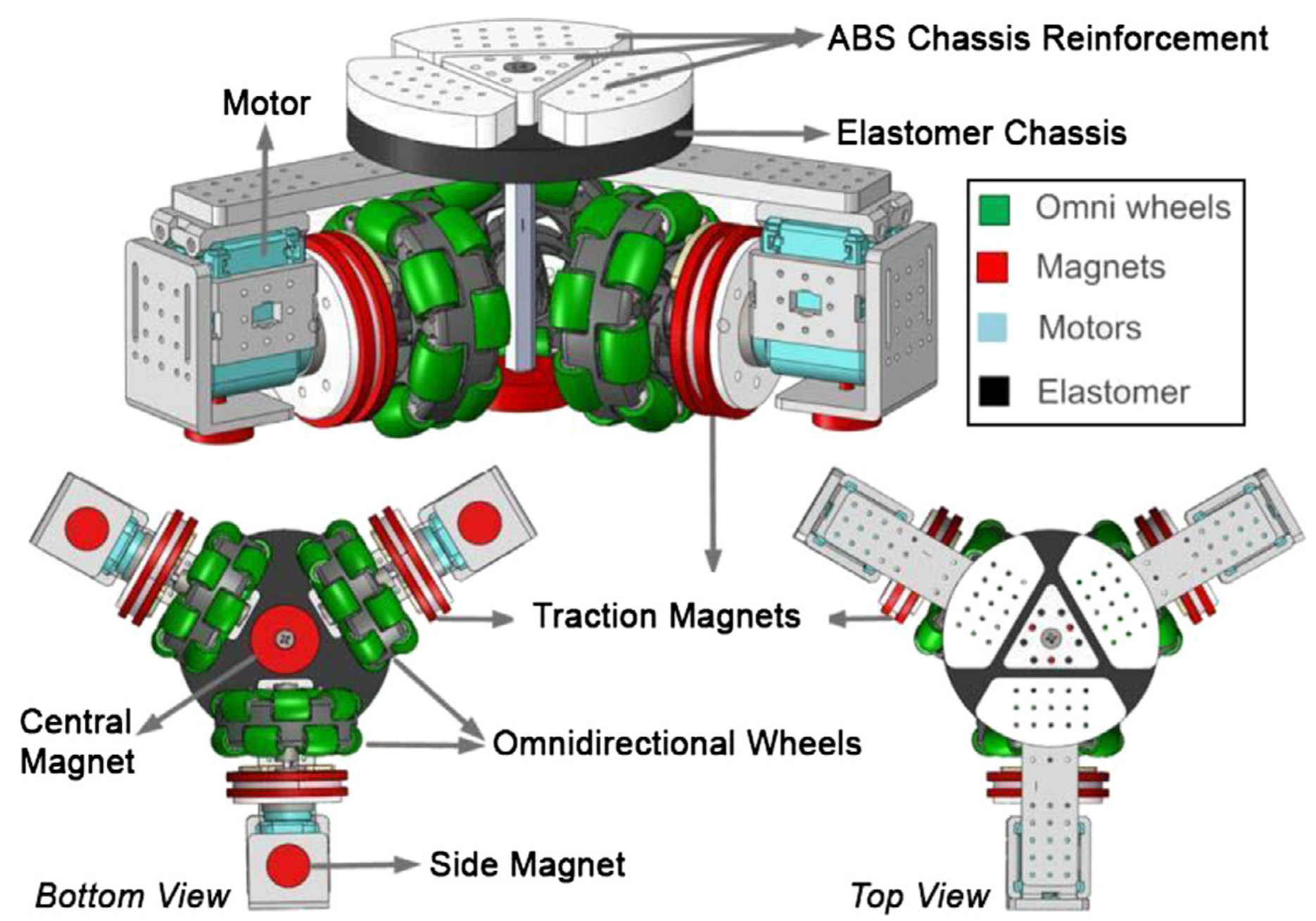
First version of the omniclimber used an elastomer with ABS reinforcement as the chassis.
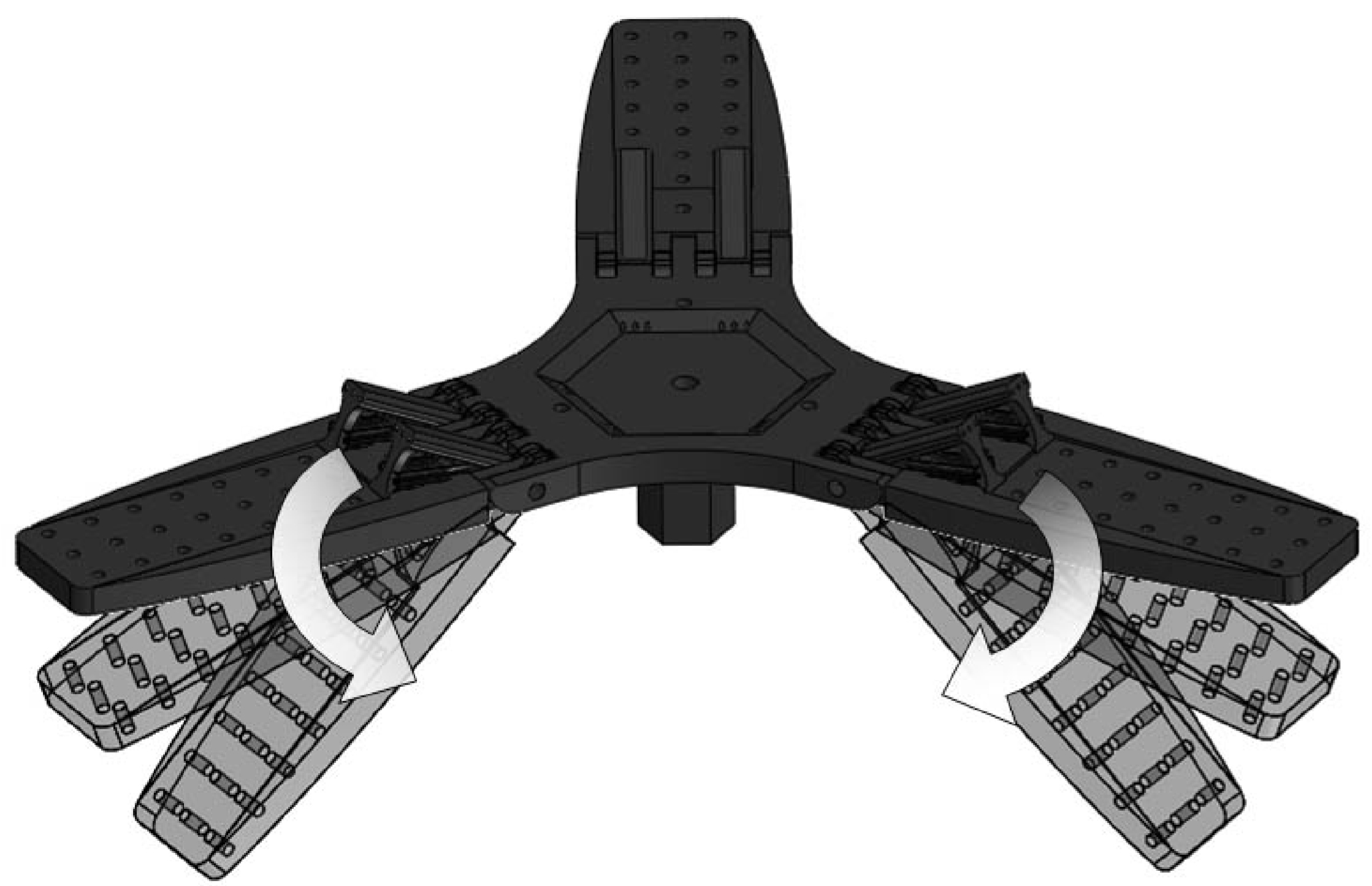
The new chassis can only bend around the necessary axes.
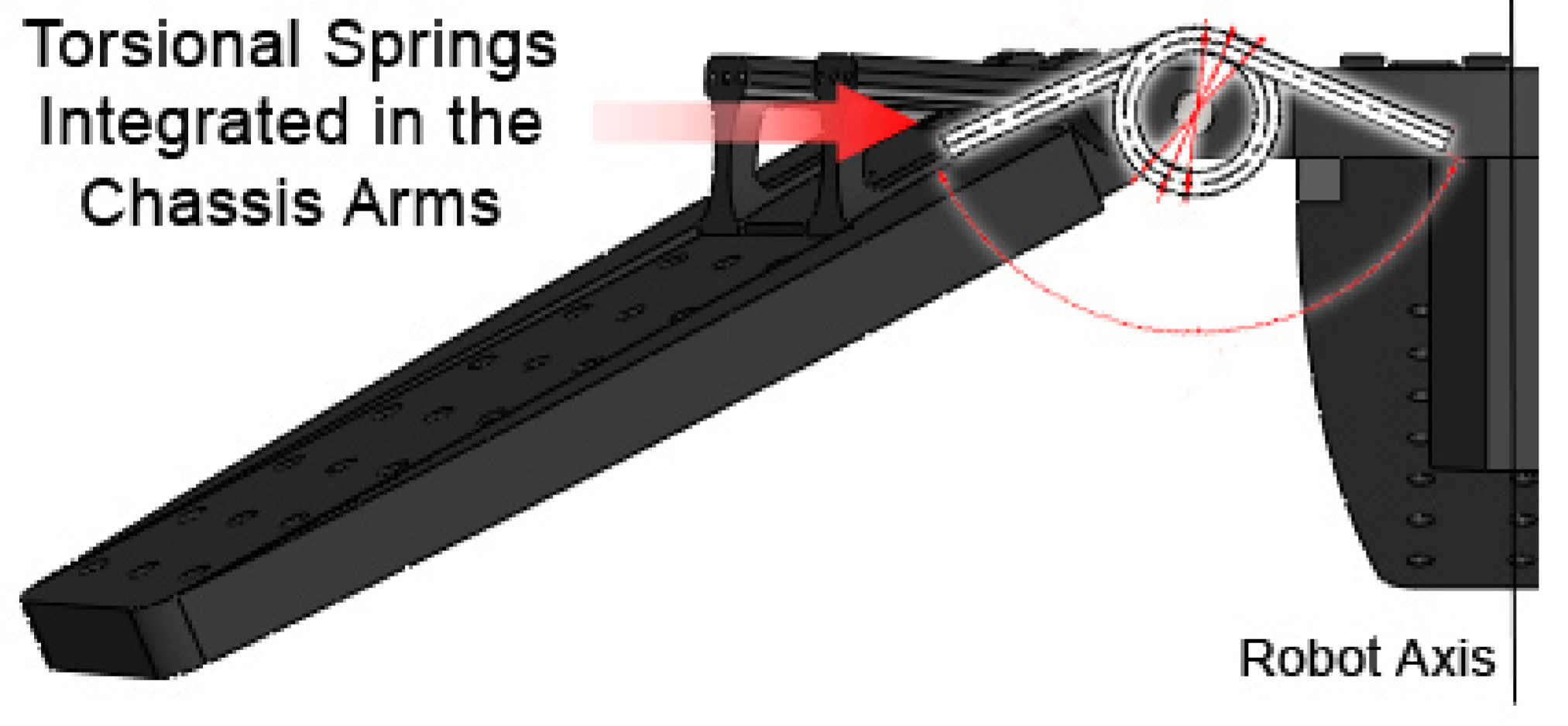
Integrated Springs in each of the OmniClimber arms.
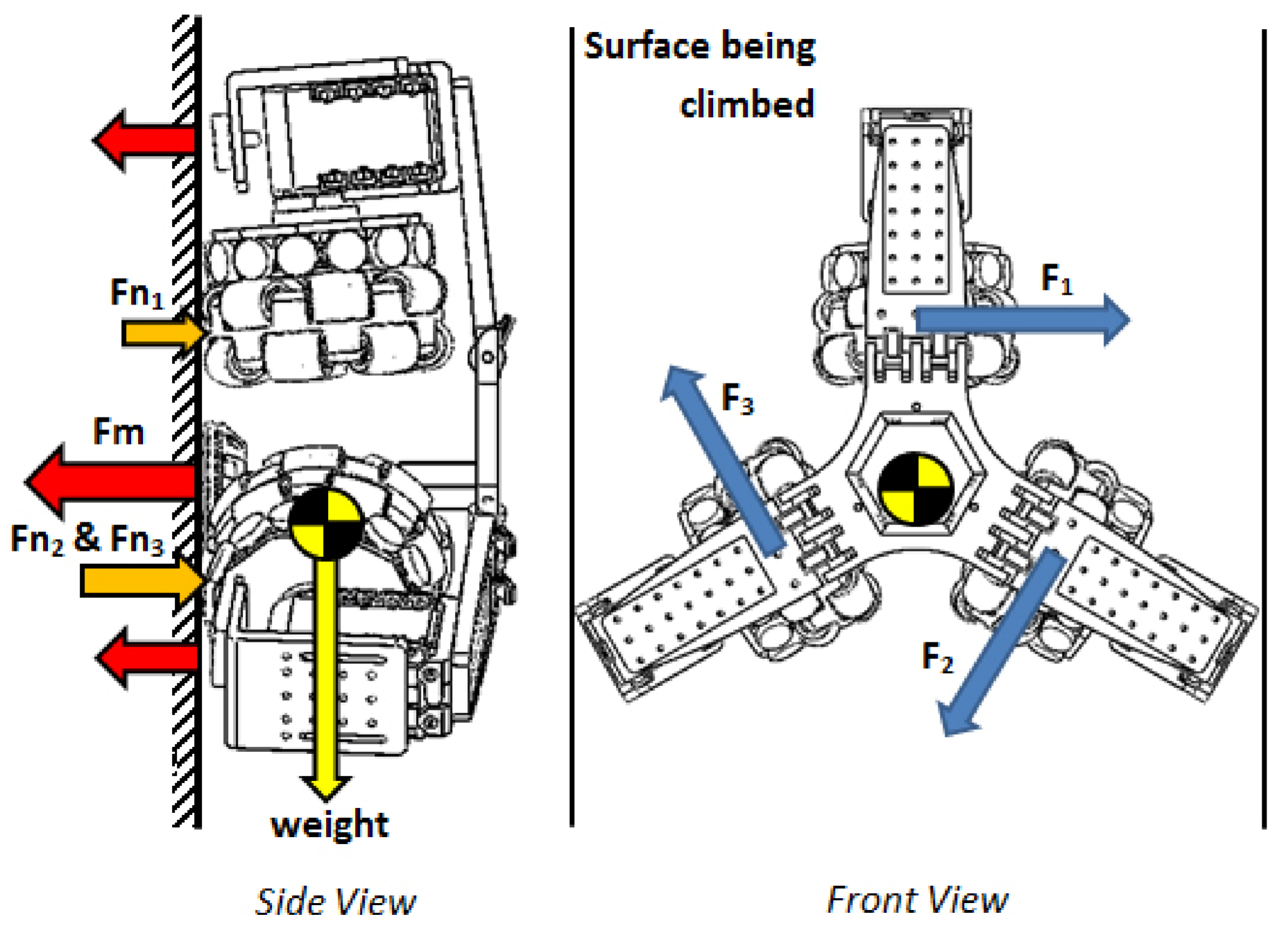
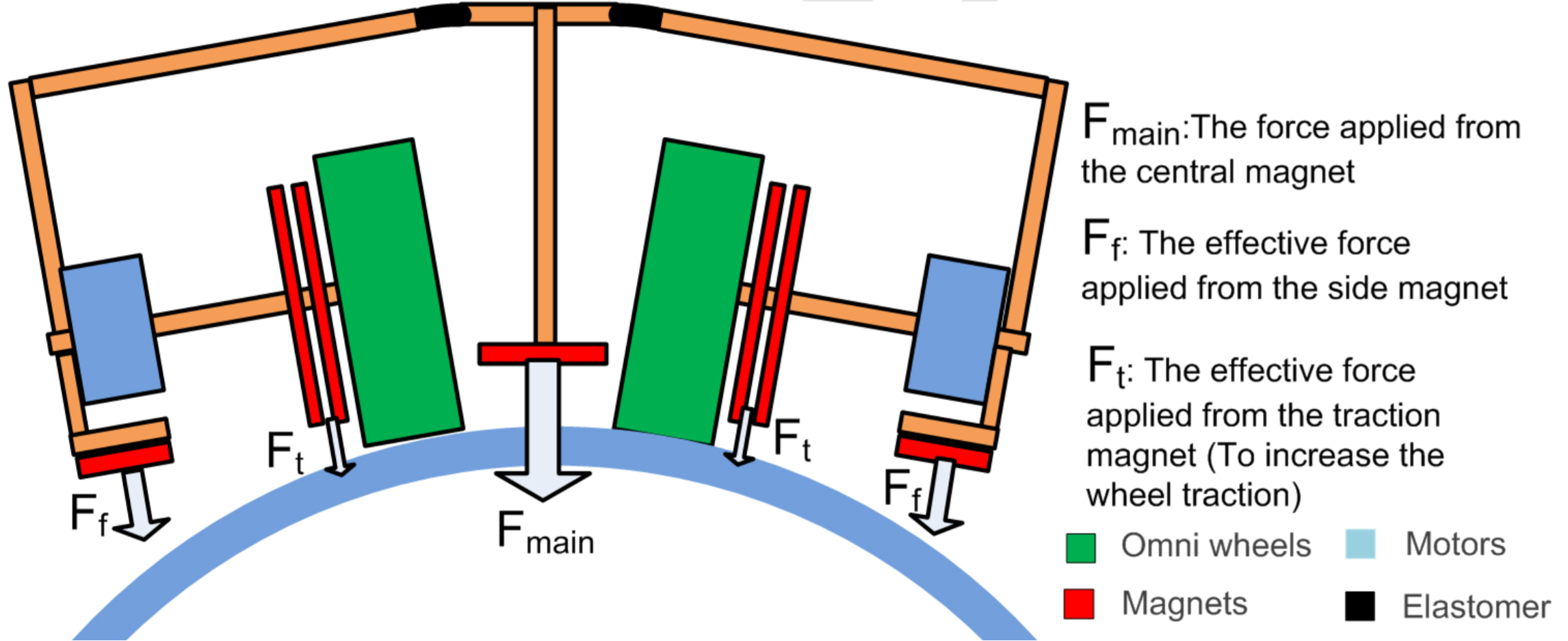
Force diagram of the Omniclimber.
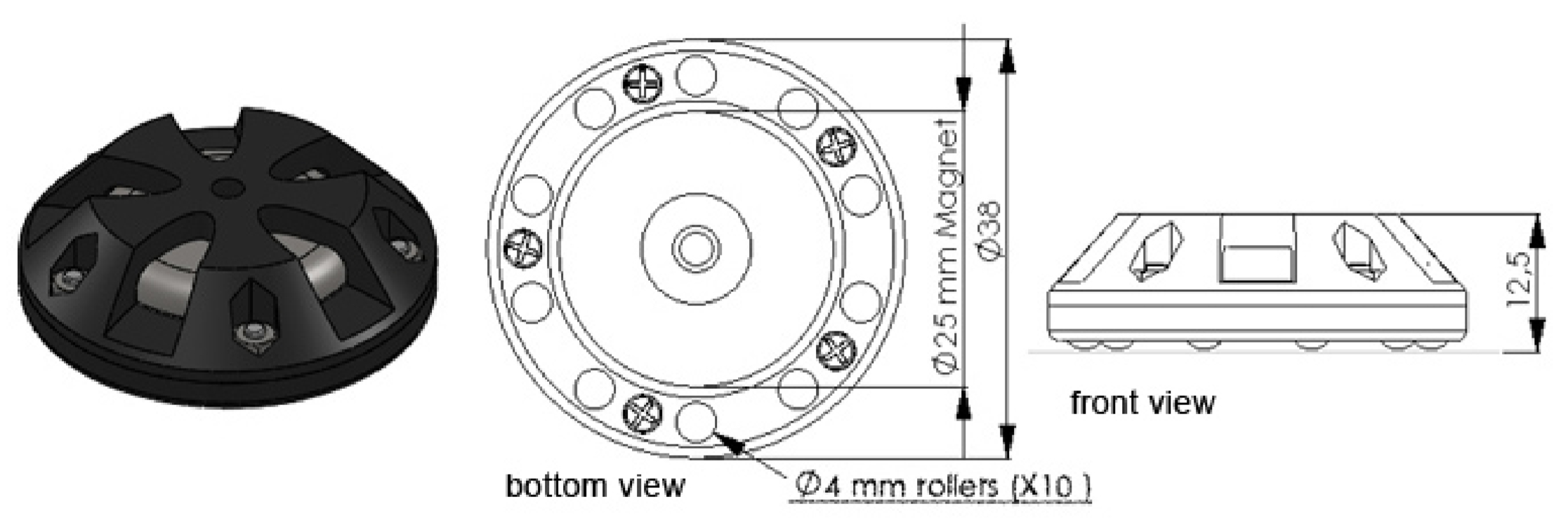
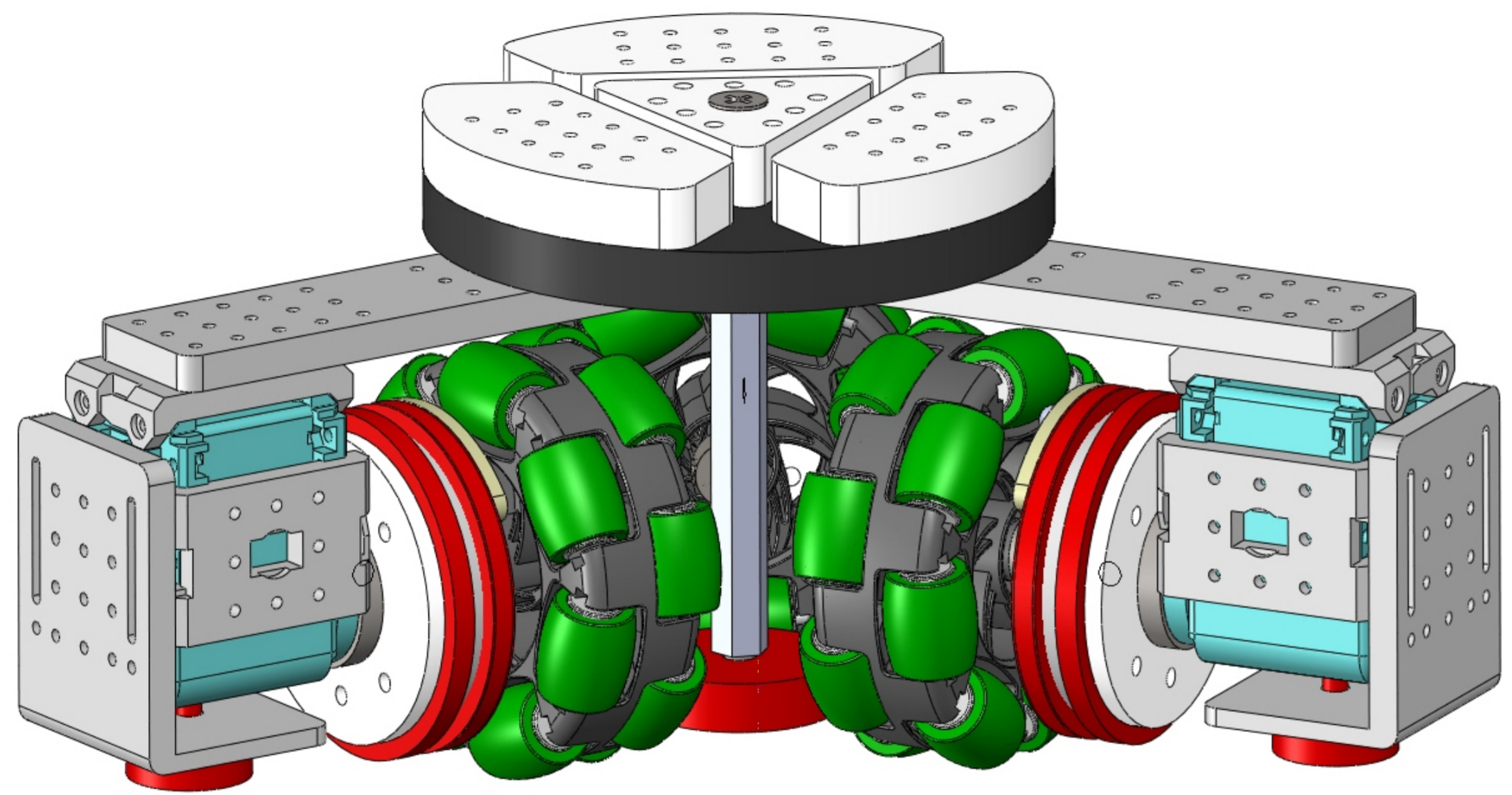
Central magnet unit solution.
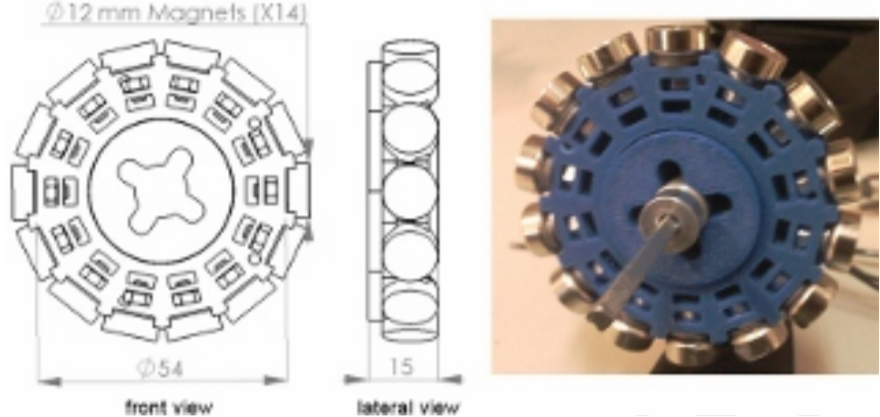
Solution for the magnetic traction for the robot wheel.
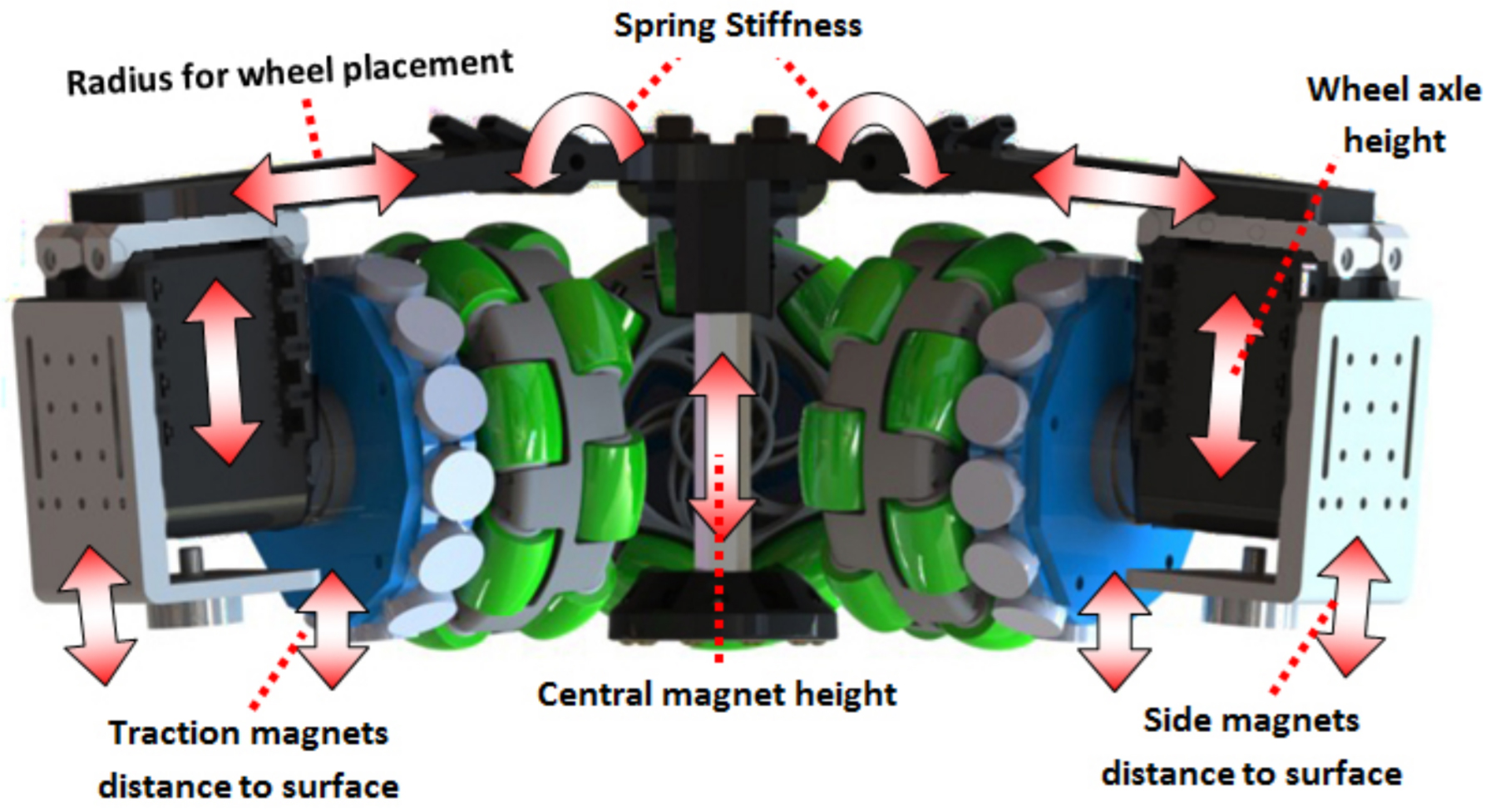
Possible adjustments on OmniClimber.
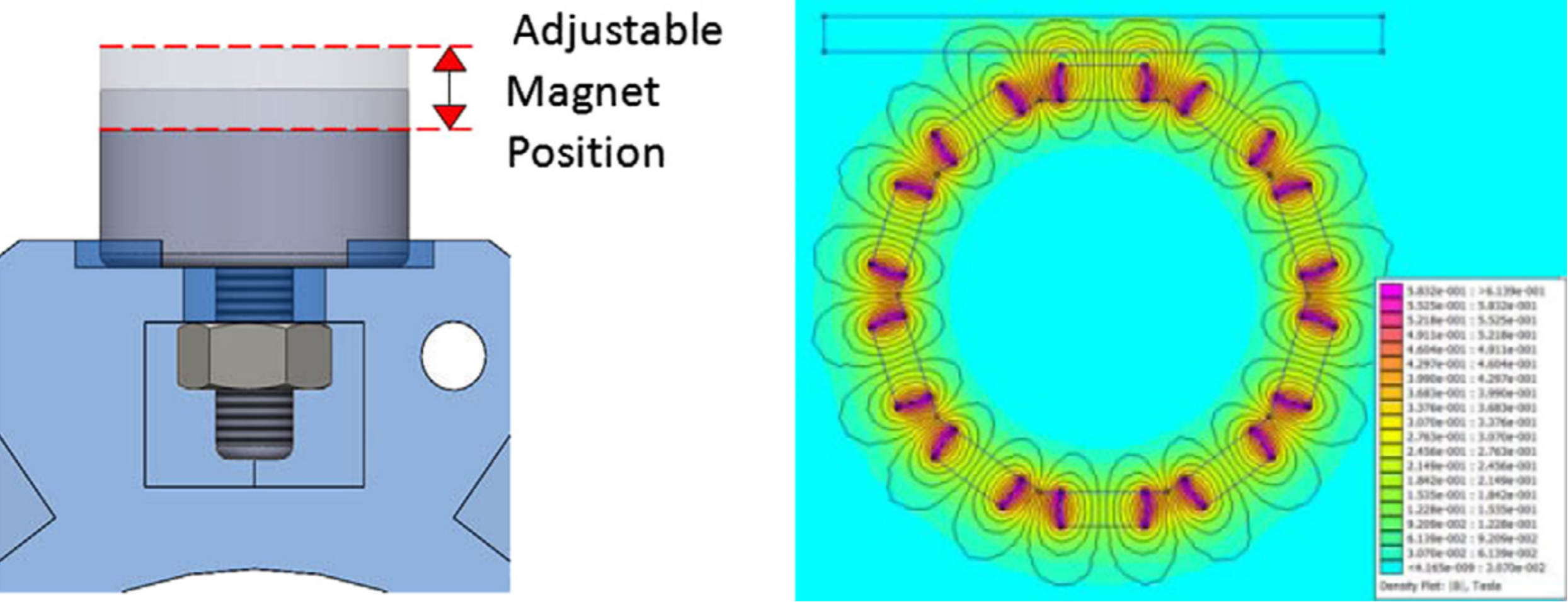
On the left: Adjustable Magnet Positioning System. On the right: 2D Magnetic Flux Field Representation.

First prototype of the Omniclimber robot.
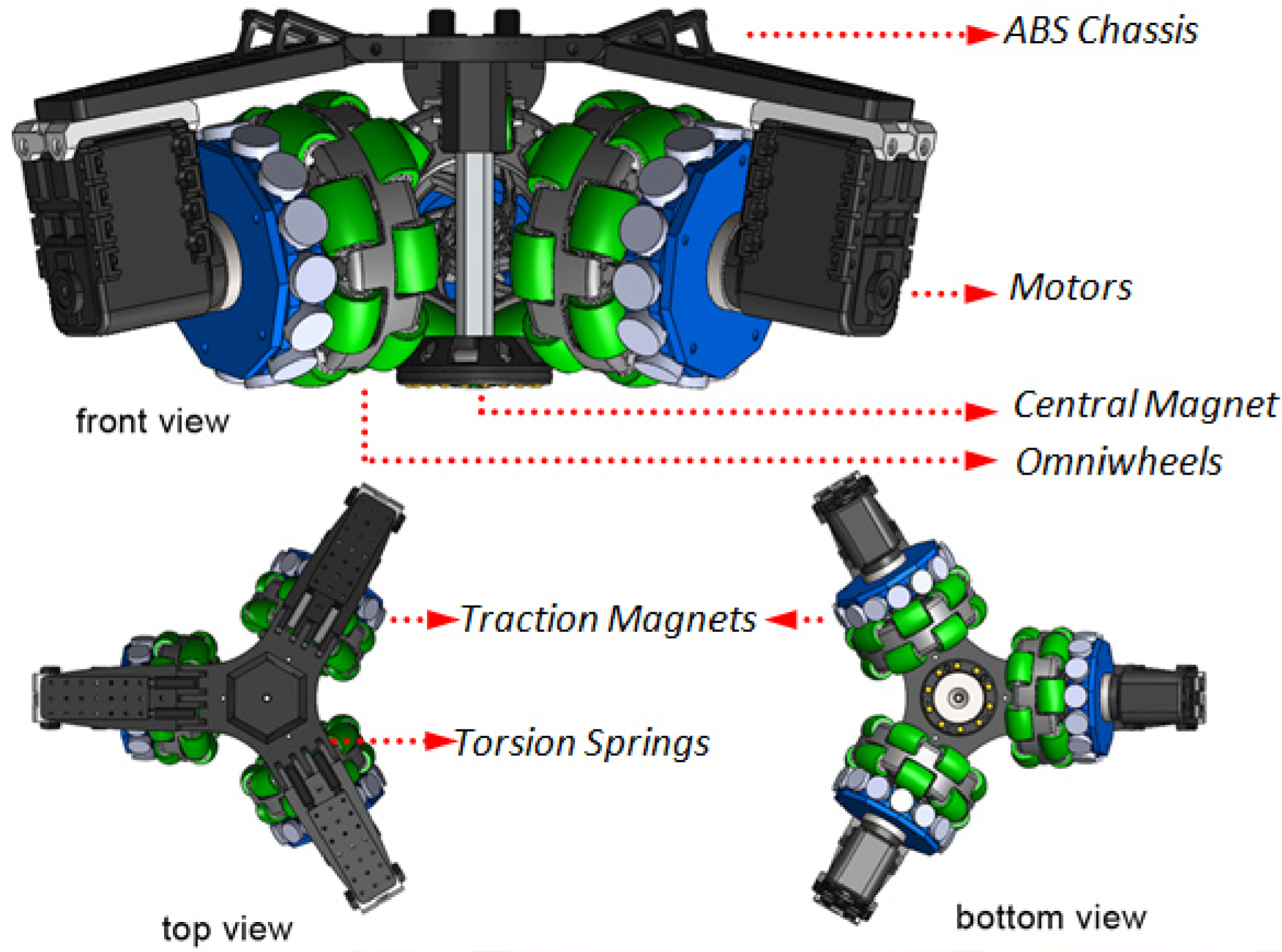
Second prototype of the Omniclimber robot. The chassis design, the central magnet and wheel traction magnets are evolved to address some of the problems associated with the first prototype.
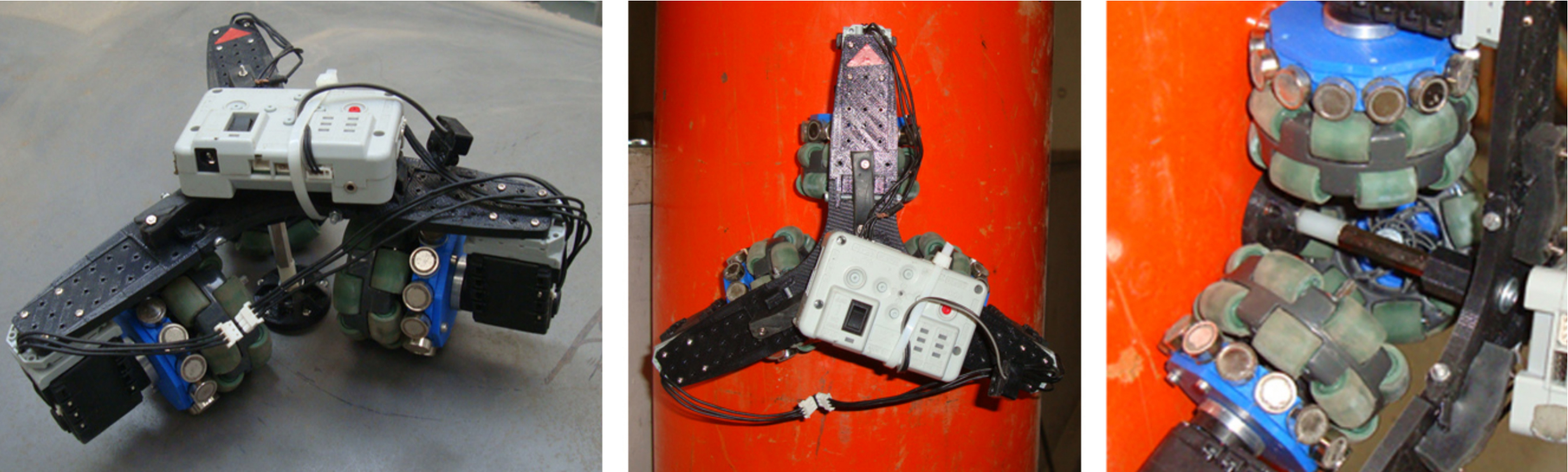
Omniclimber tested on the 150mm radius propane bottle.


A laboratory experiment on a flat surface of a locker. The omniclimber could successfully navigate on the locker, which is made of a very thin steel sheet less than 1mm.

Field test of the first prototype on an wind turbine foundation with a radius of 60cm. The robot could adapt to the structure after some adjustments on the central magnet. (1)Several detachments from the sturtcure. (2)Occasional detachment from the structure (3)Good adaptation to the structure and navigation on the structure (4)Vibration free and smooth navigation on the structure.
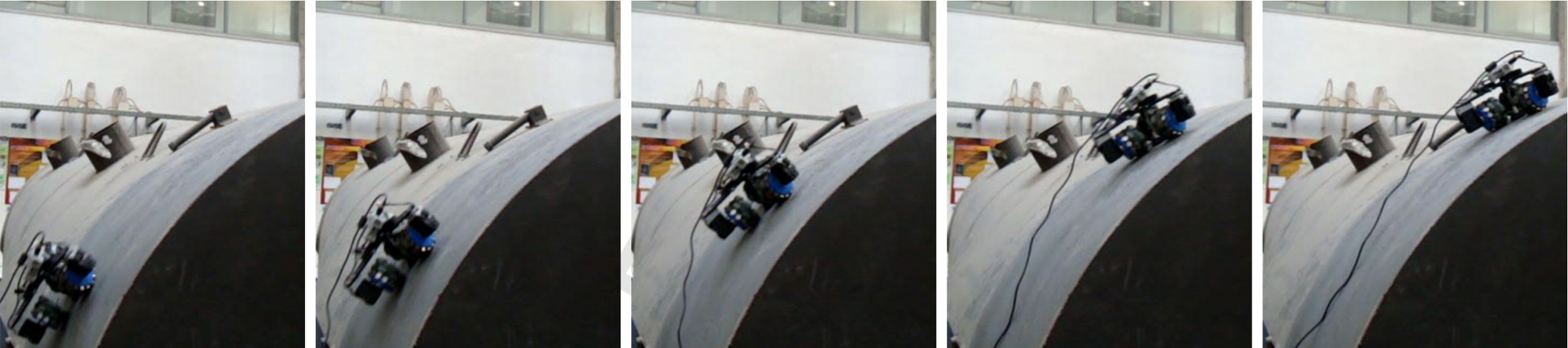
Omniclimber tested on the horizontal curved structure, with 1050mm in radius.
OmniClimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures.
M. Tavakoli, C. Viegas, L. Marques, J. Norberto Pires, A.T. de Almeida, OmniClimbers: Omni-directional magnetic wheeled climbing robots for inspection of ferromagnetic structures, Robotics and Autonomous Systems (2013), http://dx.doi.org/10.1016/j.robot.2013.05.005