

Cooperative Mapping of 3D Structures
Cooperative multi-agent mapping of 3D human made structures
In this research work, terrestrial robots cooperate with climbing robot to map a structure that the climbing robot shodl navigate on. The terrestrial robot is equipped with a kinect and a computer running ROS, and detects tags which are installed on the climbing robot. An area of the interest around the pole is formed and the point cloud outside the area of interest is filtered. The rest of the point cloud is analyzed in order to detect the circular structures.

Selected publications:
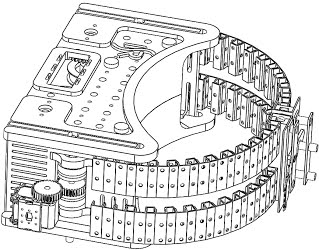
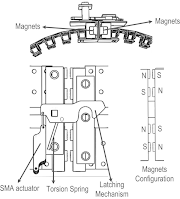
Flexirigid, a novel two phase gripper.
M.Tavakoli, Lino Marques, Anibal T. de Almeida : “Flexirigid, a novel two phase gripper”, IROS 2013,IEEE/RSJ International Conference on Intelligent RObots and Systems, Japan, 2013