

Scala and Parallel Machines.
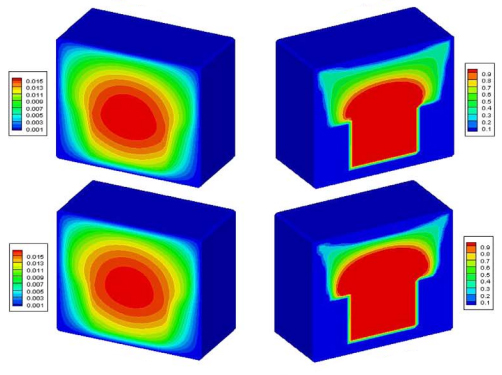
Optimal riser design in sand casting process by topology optimization with SIMP method I: Poisson approximation of nonlinear heat transfer equation.
M. Tavakoli, C. Viegas, L. Marques, J. Norberto Pires and A. T. de Almeida, “OmniClimber-II: An omnidirectional climbing robot with high maneuverability and flexibility to adapt to non-flat surfaces,” 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, 2013, pp. 1349-1354.

Inverse kinematic/dynamic analysis of a new 4-DOF hybrid (serial-parallel) pole climbing robot manipulator
Zakerzadeh M., Tavakoli M., Vossoughi G., Bagheri S. (2005) Inverse Kinematic/Dynamic Analysis of a New 4-DOF Hybrid (Serial-Parallel) Pole Climbing Robot Manipulator. In: Climbing and Walking Robots. Springer, Berlin, Heidelberg. DOIhttps://doi.org/10.1007/3-540-29461-9_90
Design and prototyping of a hybrid pole climbing and manipulating robot with minimum DOFs for construction and service applications.
Tavakoli M., Zakerzadeh M., Vossoughi G., Bagheri S. (2005) Design and Prototyping of a Hybrid Pole Climbing and Manipulating Robot with Minimum DOFs for Construction and Service Applications. In: Climbing and Walking Robots. Springer, Berlin, Heidelberg. DOIhttps://doi.org/10.1007/3-540-29461-9_105
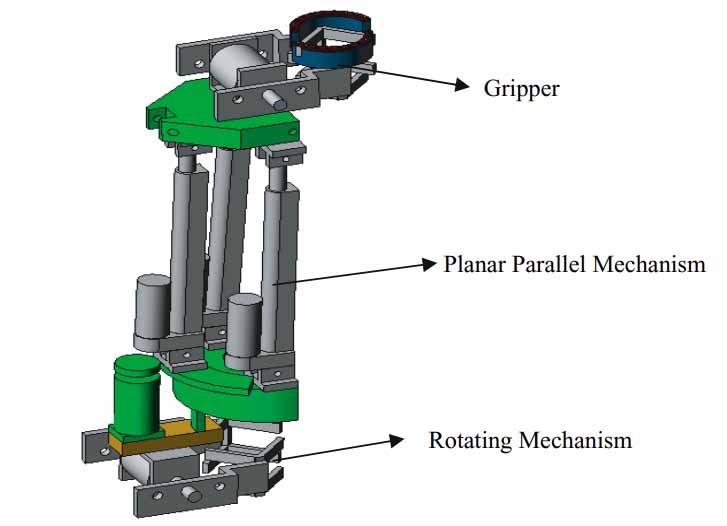
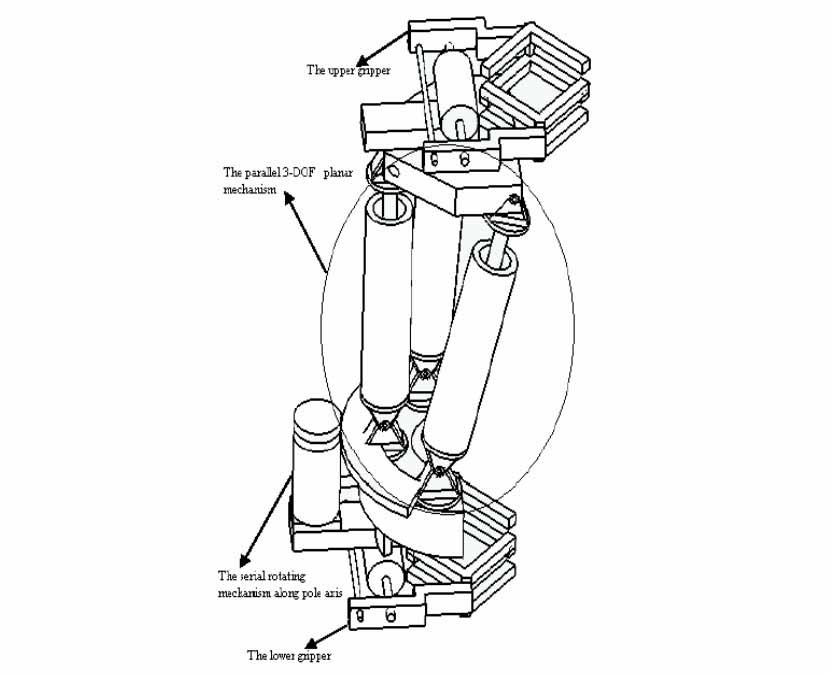
A novel serial/parallel pole climbing/manipulating robot: Design, kinematic analysis and workspace optimization with genetic algorithm.
Mahmoud Tavakoli, M Zakerzadeh, G Vossoughi, S Bagheri, H Salarieh
Design, modeling and kinematics analysis of a novel serial/parallel pole climbing and manipulating robot.
Vossoughi, G. R., Bagheri, S., Tavakoli, M., Zakerzadeh, M. R., and Hosseinzadeh, M. “Design, Modeling and Kinematics Analysis of a Novel Serial/Parallel Pole Climbing and Manipulating Robot.” Proceedings of the ASME 7th Biennial Conference on Engineering Systems Design and Analysis. Volume 2. Manchester, England. July 19–22, 2004. pp. 399-408. ASME.