

Single Channel Surface EMG Control of Advanced Prosthetic Hands:
People involved:
- Mahmoud Tavakoli
- Carlo Benussi
- Joao Luis Lourenco
The upper-limp prosthesis field has faced a rapid advancement in the last decade, due to the progress of the enabling technologies such as actuators, sensors, controllers and digital and additive fabrication. In the last couple of years, several complex prosthetic terminals were reported with multiple active degrees of freedom, which reproduce to a good extent the capabilities of the human hand in terms of grasping [1], [2]. For instance the recent commercial hands such as i-limb ([3]), Vincent ([4]), and Bebionic [5] implement 5 or 6 actuators, allowing to design quite precise grasps.
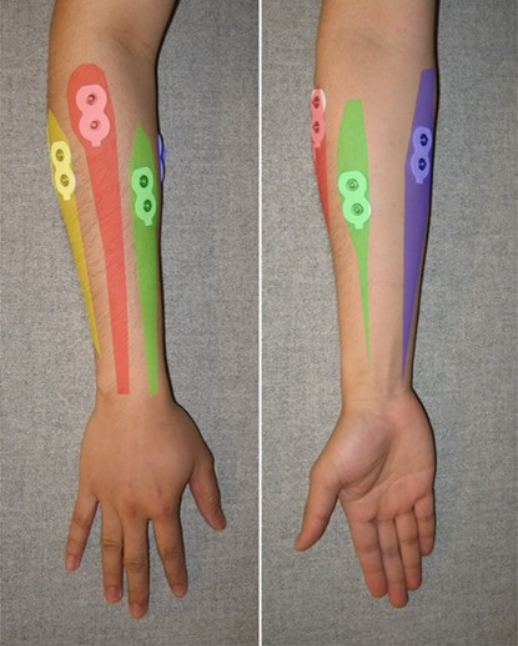
A 4 bipolar electrodes placement on the forearm, as carried out in [15]: The four electrodes are used to monitor the activity of the muscles Flexor Carpi Ulnaris (FCU), Palmaris Longus (PL), Extensor Digitorum (ED) and Extensor Carpi Radialis (ECR).
Electrodes placement: 2 electrodes detect a differential signal from the forearm, in a zone such that is possible to monitor the wrist and fingers activities, the other electrode is placed on a bone zone to work as a reference value (ground).

(a) Differential

(b) Ground
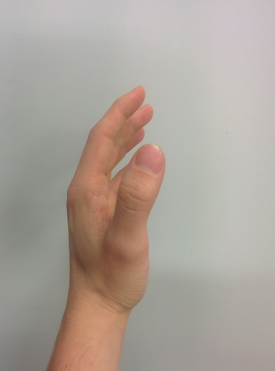
Rest

Close

Open
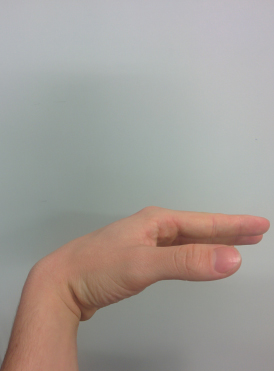
Change
Hand movements: the figures show the hand movements matched with the 3 inputs required to control the prosthetic hand.
Single channel surface EMG control of advanced prosthetic hands: A simple, low cost and efficient approach
M. Tavakoli, C. Benussi, J. Lourenco, Single channel surface EMG control of advanced prosthetic hands: A simple, low cost and efficient approach, Expert Systems with Applications, Volume 79, 2017, 322-332, ISSN 0957-4174,