

SCALA: Scalable Modular Rail based Multi-agent Robotic System for Fine Manipulation over Large Workspaces
Design and Development.
People involved:
- Mahmoud Tavakoli
- Carlos Viegas
- Lucio Sgrigna
- Anibal T De Almeida

The goal of this project is to enable fine manipulation in very large workspaces, using robots that move on the rails. While industrial arms have high positioning accuracy, mobile robots benefit from a large infinite workspace. But how to combine them?
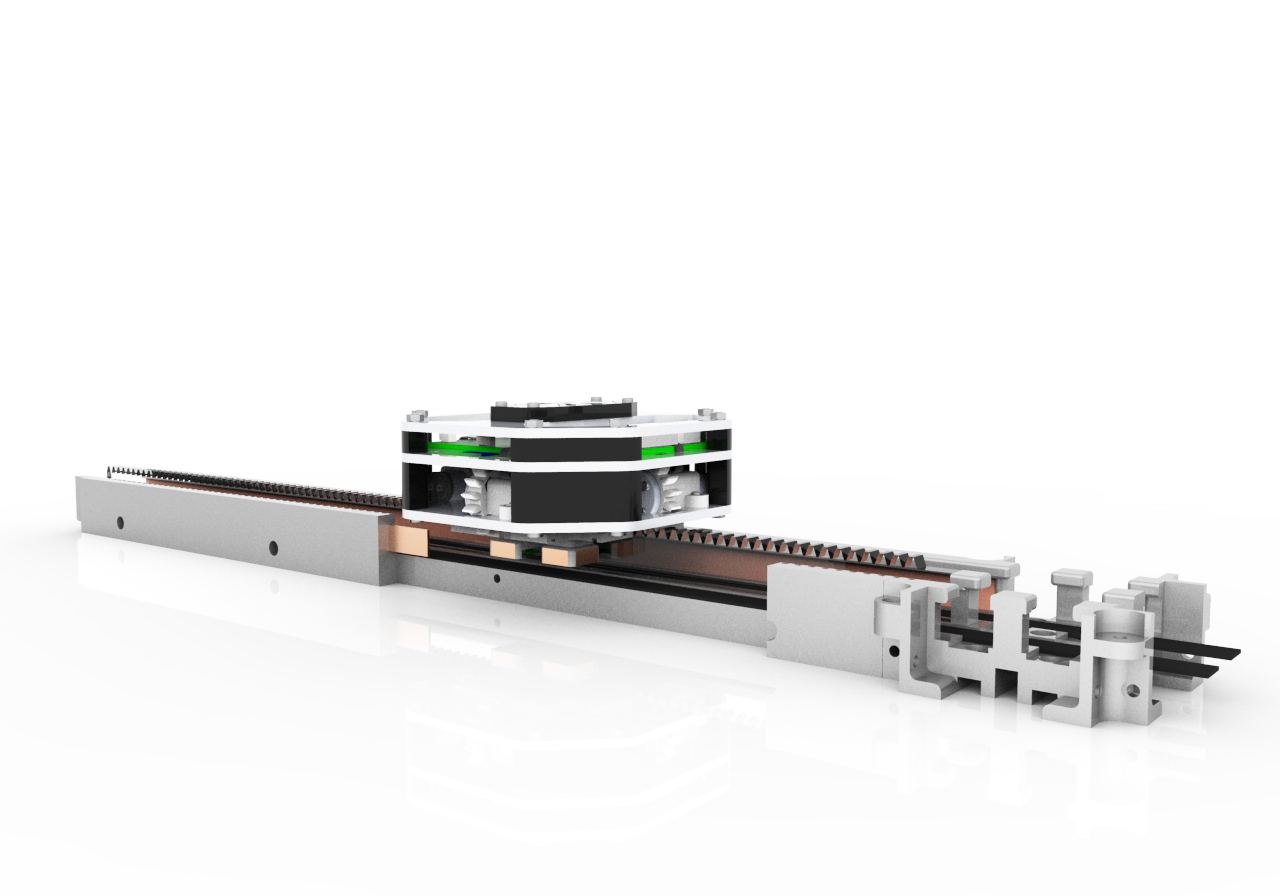
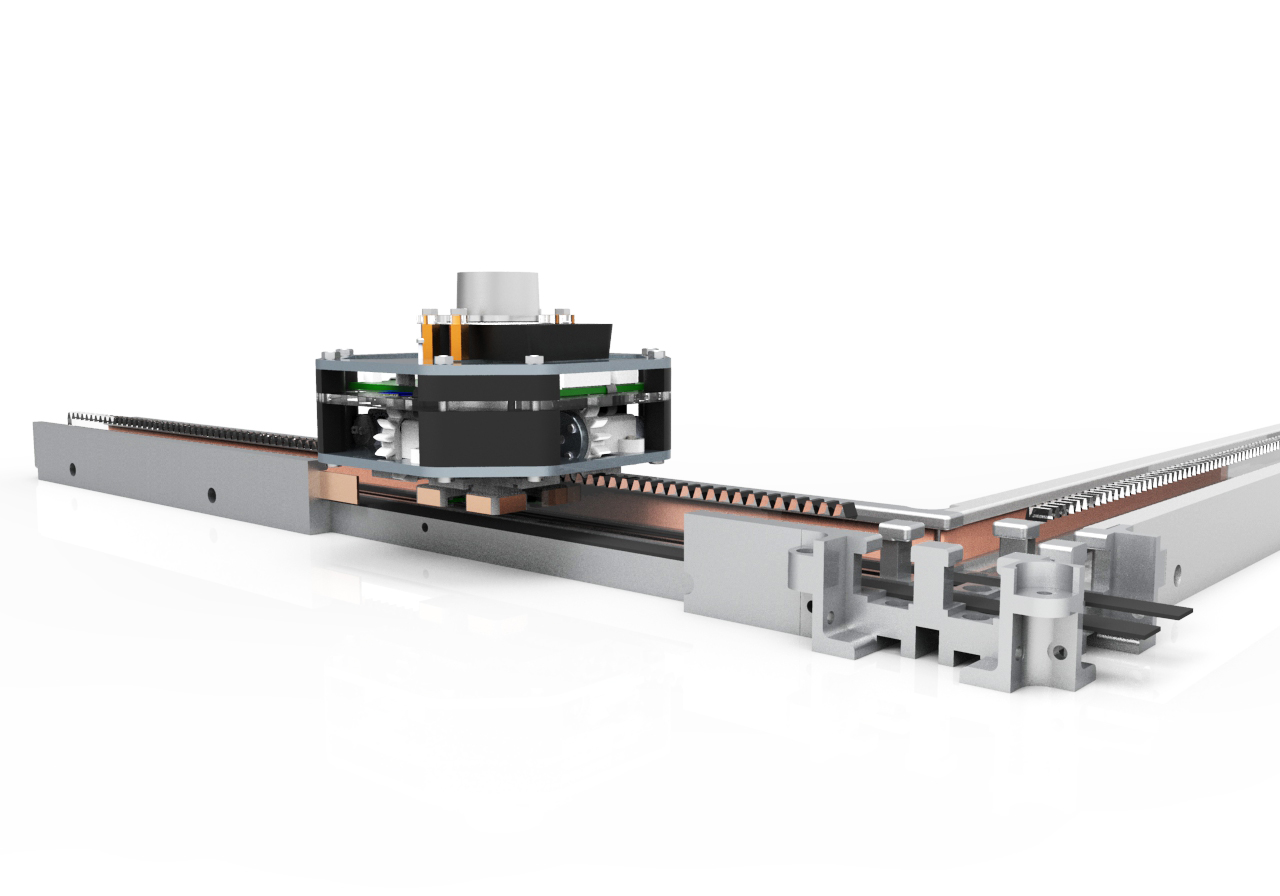
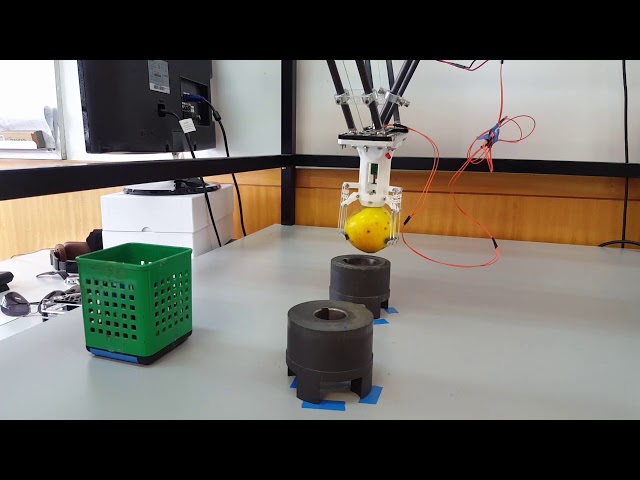
Scala is an innovative, low cost and very modular platform fully designed and developed in ISR-UC in Professor Tavakoli´s group. It is composed of modular instrumented rails with integrated linear encoders, modular mobile robots, and junctions, These junctions make these robots different from another type of rail robots. They allow the robots to move independently in a large horizontal or vertical mesh. It can be installed on the ceiling for factory automation or on a vertical mesh for warehouse automation. We have demonstrated various applications such as surveillance, Pick and Place on a large workspace, 3D printing, and 3D laser engraving.

For more information please see this articles:
Performance analysis and design of parallel kinematic machines using interval analysis.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.
SCALA: Scalable Modular Rail based Multi-agent Robotic System for Fine Manipulation over Large Workspaces
Tavakoli, M., Viegas, C., Sgrigna, L. et al. J Intell Robot Syst (2018) 89: 421. https://doi.org/10.1007/s10846-017-0560-3
SCALA: A Scalable Rail-based Multirobot System for Large Space Automation: Design and Development
C. Viegas, M. Tavakoli, P. Lopes, R. Dessi and A. T. de Almeida, "SCALA—A Scalable Rail-based Multirobot System for Large Space Automation: Design and Development," in IEEE/ASME Transactions on Mechatronics, vol. 22, no. 5, pp. 2208-2217, Oct. 2017.
doi: 10.1109/TMECH.2017.2740723
A novel grid-based reconfigurable spatial parallel mechanism with large workspace.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.