

Compliant Robotics Hands with Integrated Soft MEMS Skin- Marflex- Funded by CMU Portugal Framework
The aim of this project is development of low-cost under-actuated anthropomorphic hands with compliant materials in joints, and embedded sensors, and skin for prosthesis applications .
Research on both hand and the skin are being performed by a team of Mechanical eng., Electrical Eng., and Biomedical Engineers.
People involved:
- Mahmoud Tavakoli
- Baptiste Enes
- Lino Marques
- Thomas Feix
- Rafael Batista
- Pedro Neto
e-Skin for Prosthetic hand that can measure pressure, proximity and touch.
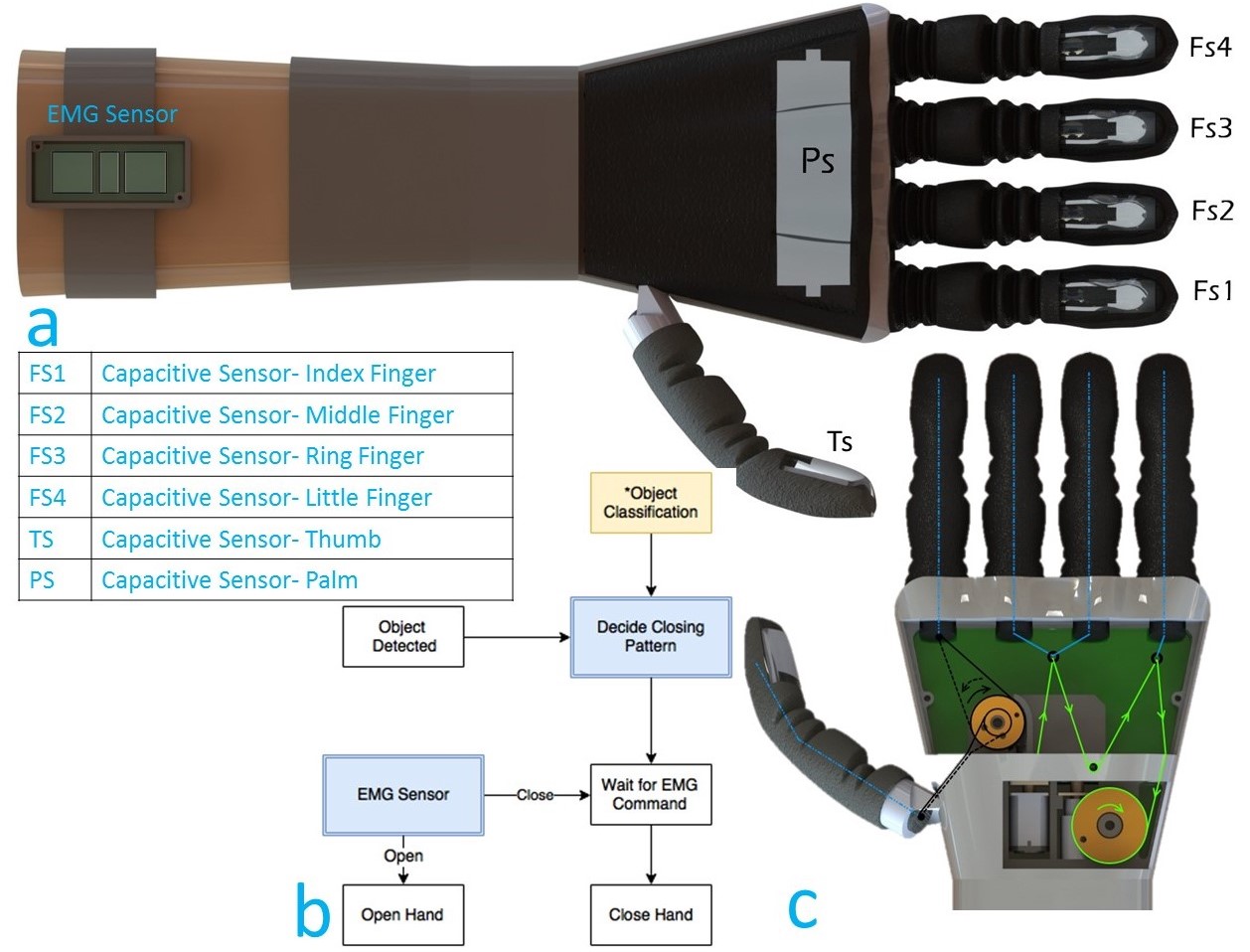
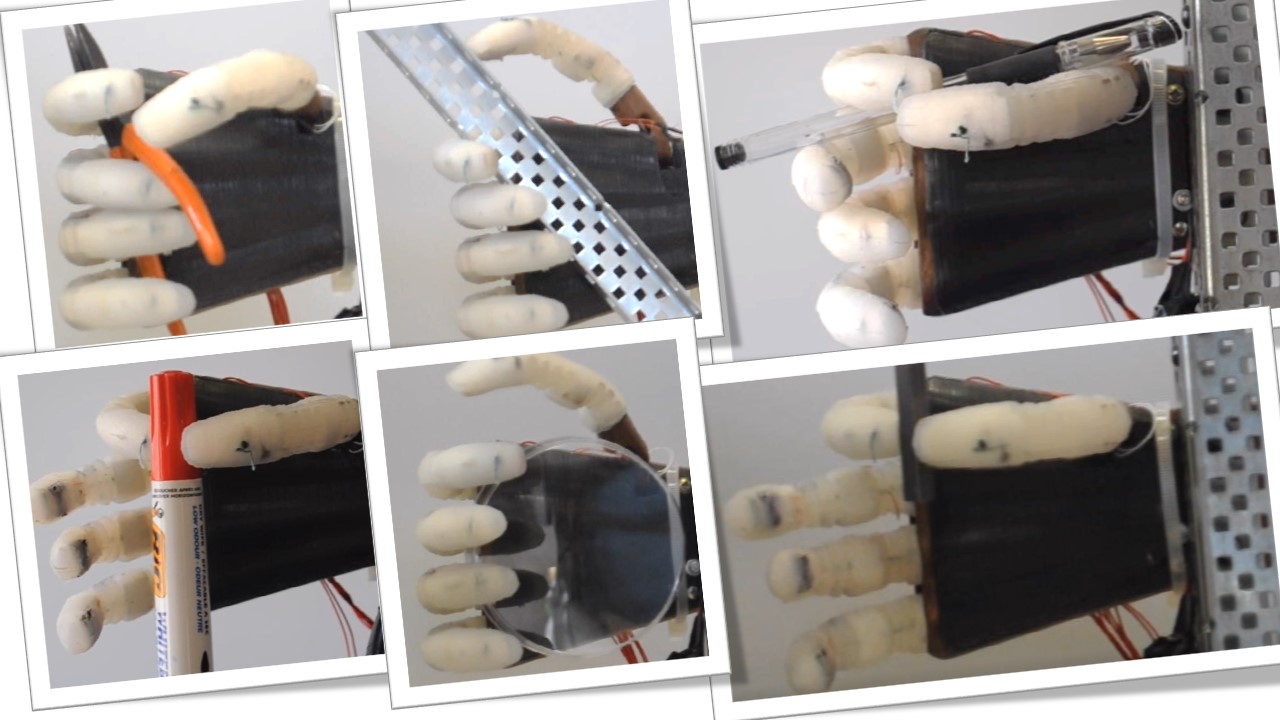
Using the e-skin, the hand autonomously chooses between a precision grasp, a power grasp, or an intermediate grasp.
ISR-SoftHand

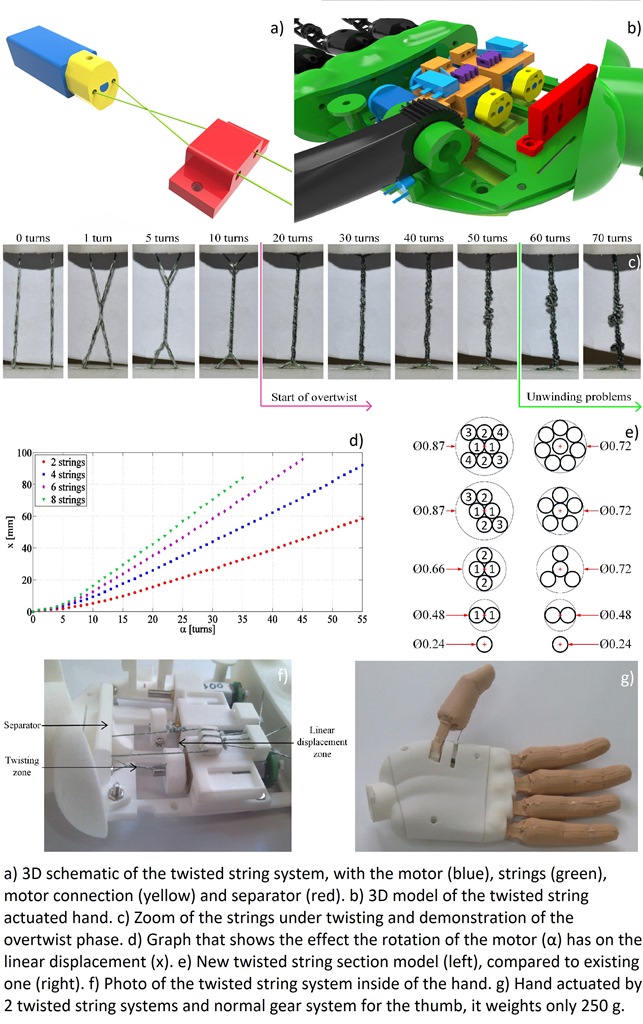
Twisted String Actuators for Compact Prosthetic Hands. The UC soft hand.
Selected Publications:
Autonomous Selection of Closing Posture of a Robotic Hand
Tavakoli, Mahmoud, et al. "Autonomous Selection of Closing Posture of a Robotic Hand Through Embodied Soft Matter Capacitive Sensors." IEEE Sensors Journal 17.17 (2017): 5669-5677.
A Compact Two-Phase Twisted String Actuation System
M. Tavakoli, R. Batista, and P. Neto, A Compact Two-Phase Twisted String Actuation System: Modeling and Validation, Mechanism and Machine Theory 11,23-25, 2016
Actuation Configurations of Bionic Hands for a Better Anthropomorphism
M. Tavakoli, et. al. Actuation Configurations of Bionic Hands for a Better Anthropomorphism Index, ASME Journal of Mechanisms and Robotics 8 (4), 044502, 2016
The hybrid OmniClimber robot.
M. Tavakoli, et. al. , “The hybrid OmniClimber robot: Wheel based climbing, arm based plane transition, and switchable magnet adhesion”, Mechatronics. 2016
The UC Softhand.
M. Tavakoli, R. Batista, and Lucio Sgrigna, The UC Softhand: Light Weight Adaptive Bionic Hand with a Compact Twisted String Actuation System, Actuators, 5(1), 2015
Underactuated anthropomorphic hands.
M. Tavakoli, B. Enes, et. al. “Underactuated anthropomorphic hands: actuation strategies for a better functionality” Robotics and Autonomous Systems 74, 267-282, 2015