

Actuation configurations of bionic hands for a better anthropomorphism index
People involved:
- Mahmoud Tavakoli
- Baptiste Enes
- Lino Marques
- Thomas Feix
In this study, we analyze different actuation configurations for bionic hands in order to improve their level of anthropomorphism. We used a previously developed benchmark, the Anthropomorphism Index (AI), for 15 different actuation configurations of hands from one to five actuators. By comparing the AI of these configurations we obtained important conclusions regarding the actuation strategy of the anthropomorphic hands with a limited number of actuators. Results show that the actuation configuration is very important for increasing the level of anthropomorphism of the hands. It is shown that with an appropriate actuation configuration a configuration with lower number of actuators can result in a higher AI than a configuration with higher number of actuators. We also showed the best actuation configurations for each category of 1 to 5 actuators. Results can be used as a guideline for development of hands with high anthropomorphism in terms of grasping postures.
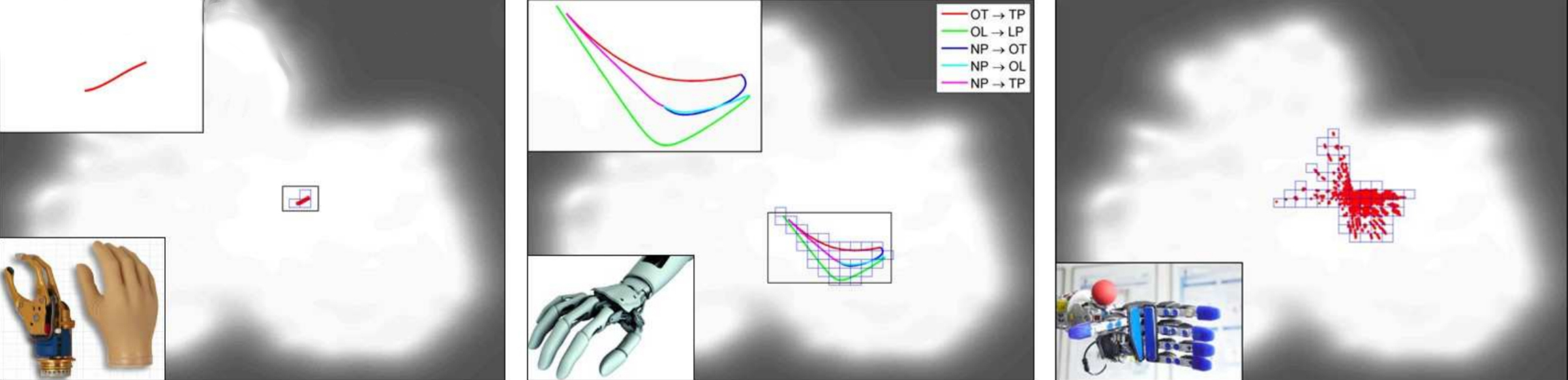
Fig. 1: Tested hands, and projection of the fingertip movements to the latent space and their AI. Left: Sensorhand (AI=0.25) [1], Middle: Michelangelo (AI=2.8) [2], Right: FRH-4 (AI=5.2) [3], [4].
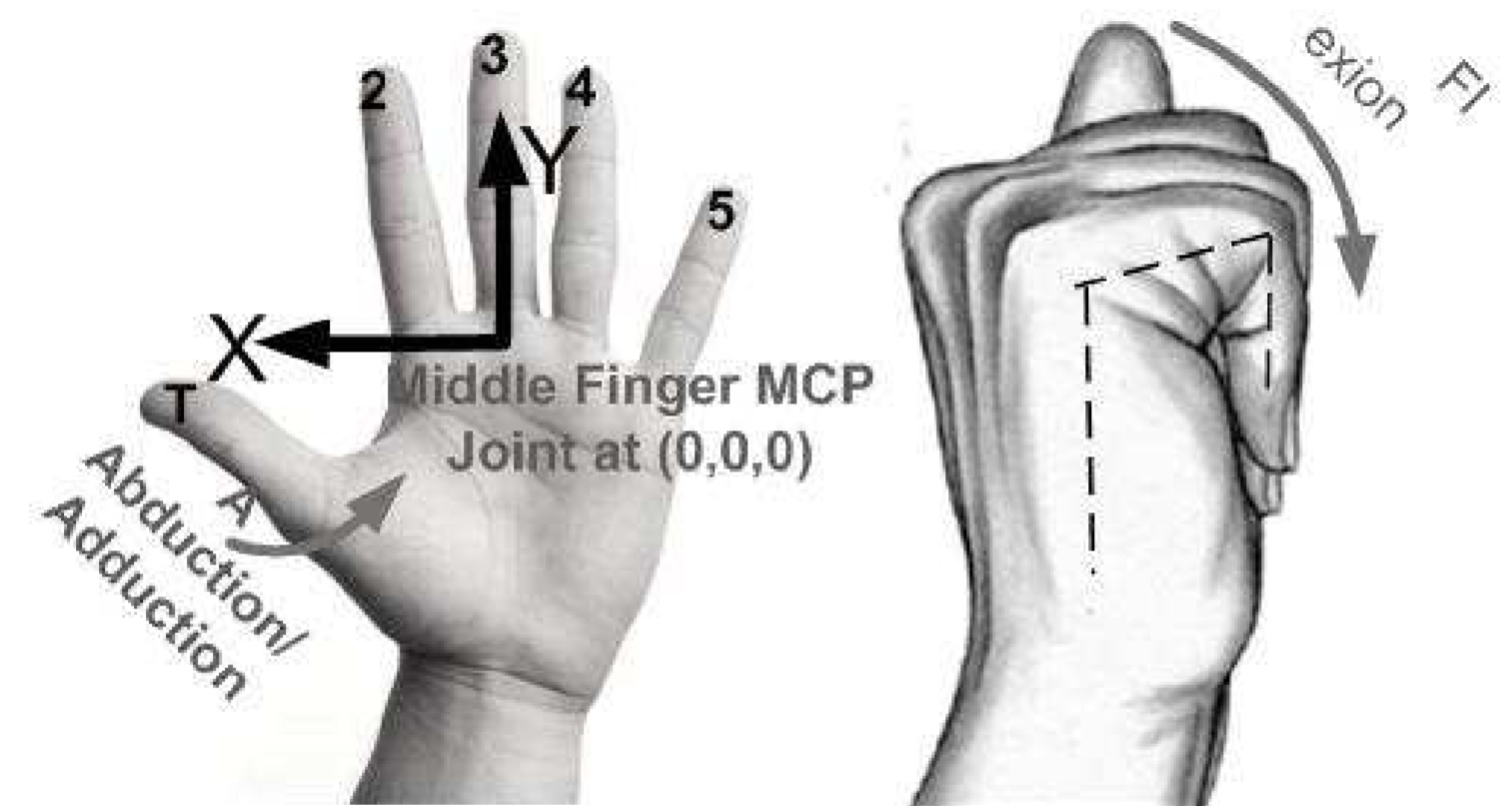
Number and symbol designations and the Coordinate system to which the measurements are referenced.
Actuation configurations of bionic hands for a better anthropomorphism index.
Tavakoli, M., Enes, B., Marques, L., and Feix, T. (March 7, 2016). “Actuation Configurations of Bionic Hands for a Better Anthropomorphism Index.” ASME. J. Mechanisms Robotics. August 2016; 8(4): 044502.