

A single dof arm for transition of climbing robots between perpendicular planes.
People involved:
- Carlos Viegas
- Mahmoud Tavakoli
This paper introduces a novel single DOF plane transition mechanism, designed to enable wheel based climbing robots to transit between perpendicular planes. The developed mechanism is composed of an arm with two revolute joints derived by a single motor. An innovative transmission mechanism is designed based on the required trajectory and relative position for each arm link, enabling individual or simultaneous rotation of the two joints during the transition movement. An electromagnetic unit which adapts to both flat and curved structures is also designed and integrated in the arm. This solution was installed on the omnidirectional climbing robot, OmniClimber. The mechanism was successfully tested on a curved structure with a diameter of 220mm.

Environment for service climbing robots.
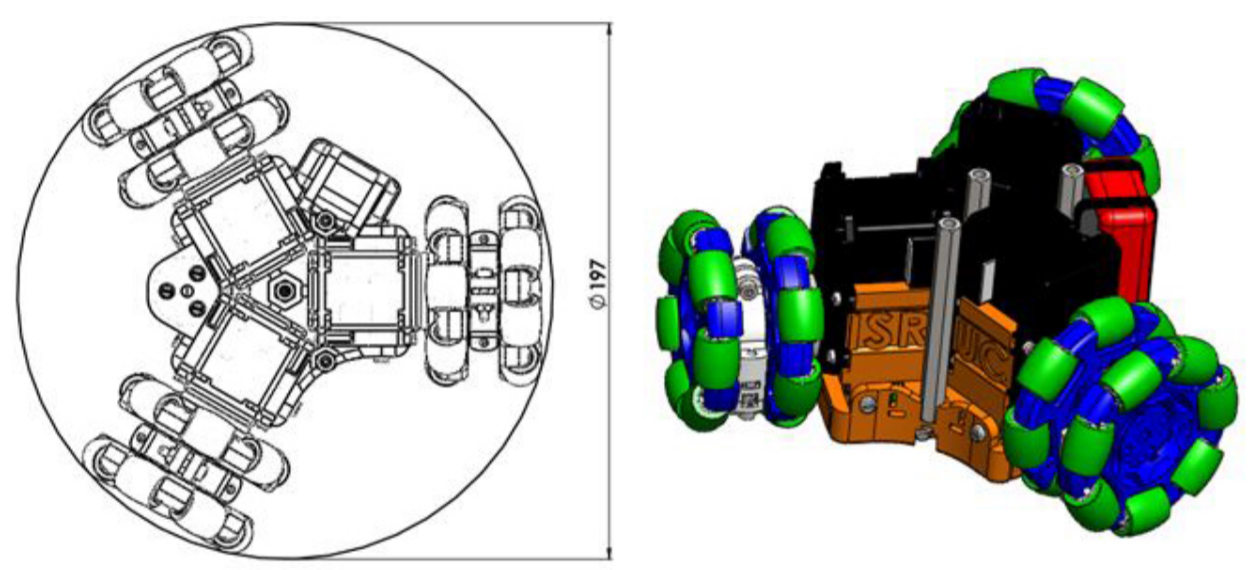
OmniClimber-VI.
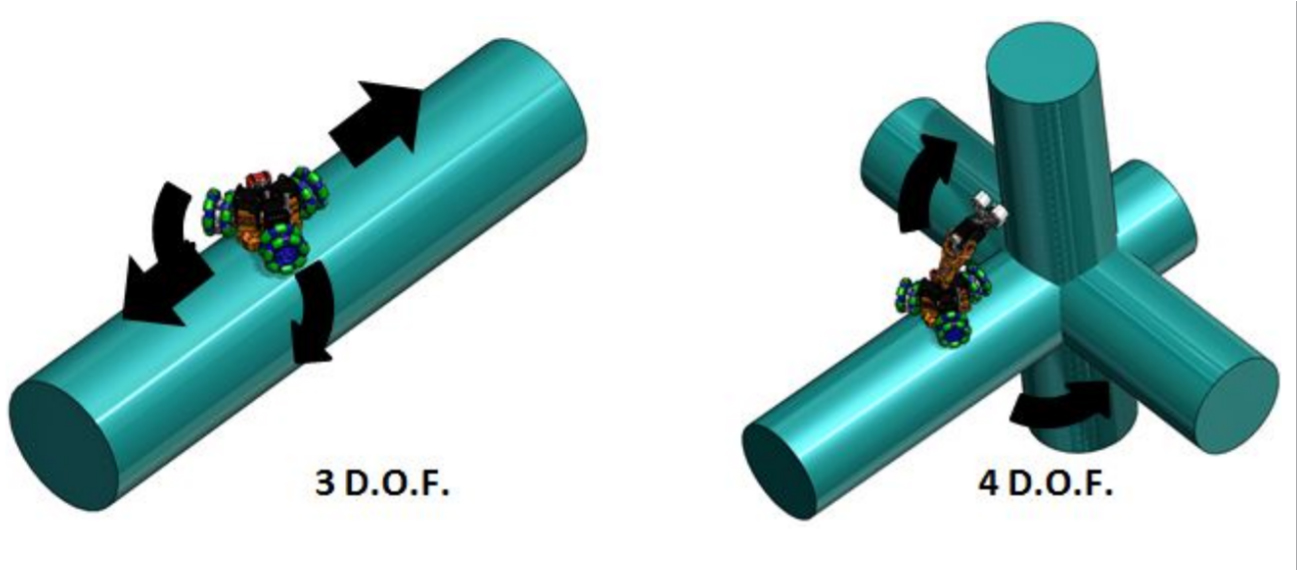
3D mobility of the climbing robot without and with the new plane transition mechanism.

Novel plane transition mechanism on the OmniClimber-VI.
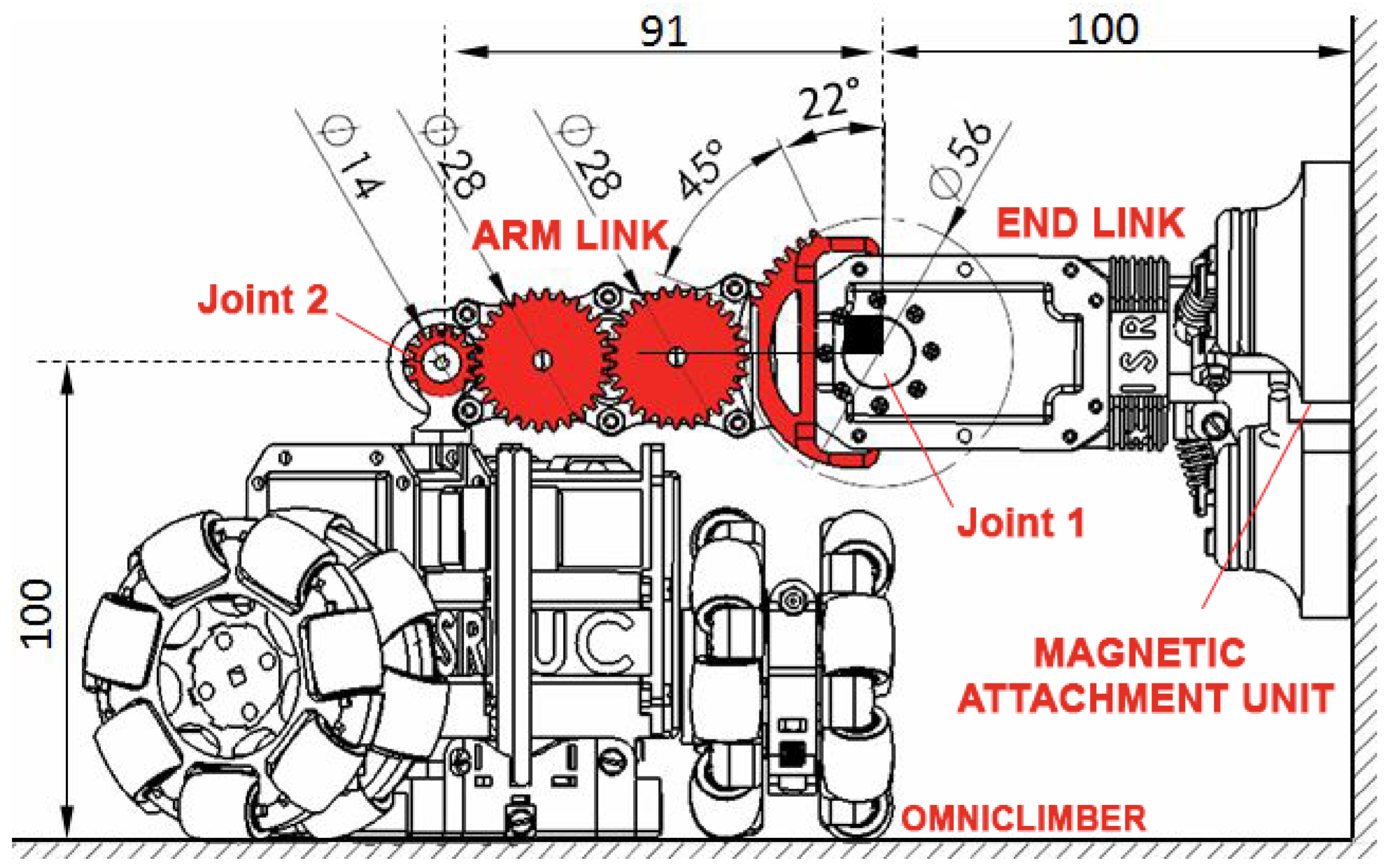
Novel plane transition mechanism on the OmniClimber-VI, showing the detail design of the transmission mechanism and its dimensions.
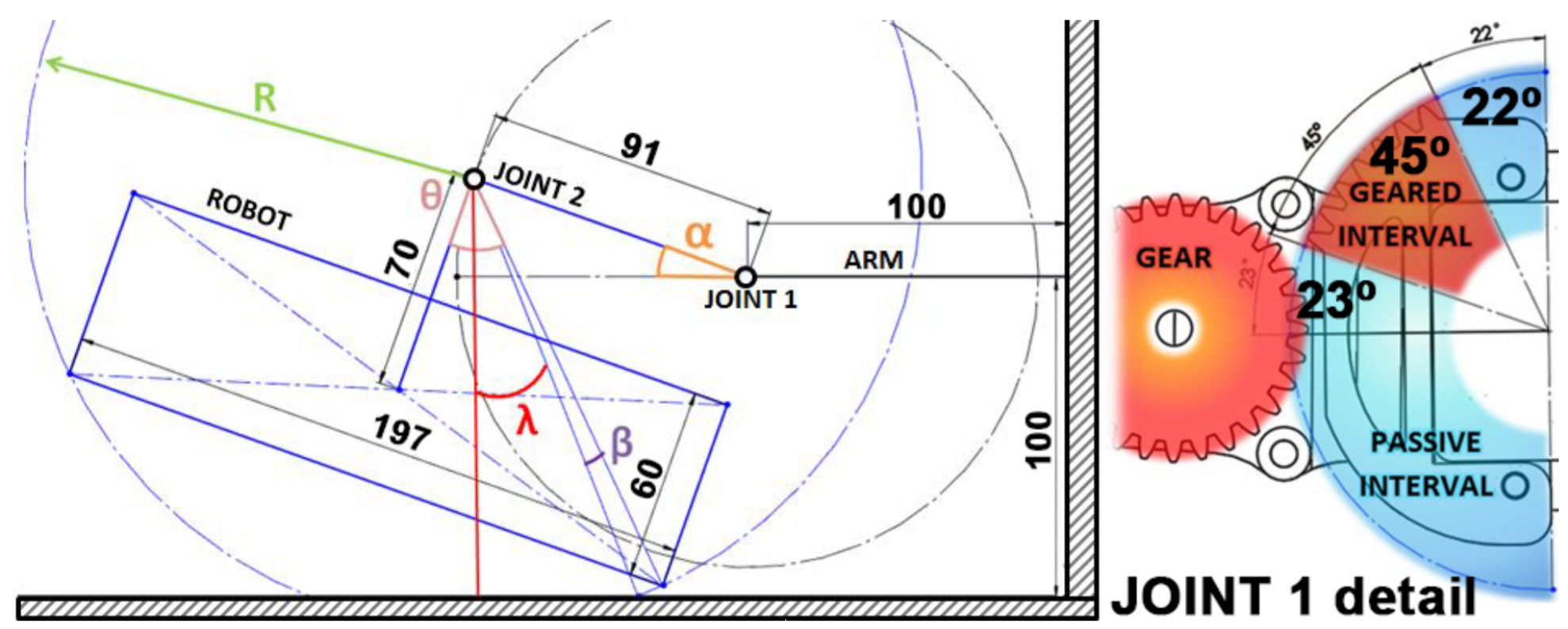
Calculation of gap angles on the big gear and the active-passive interval of the gear transmission mechanism of the first joint.
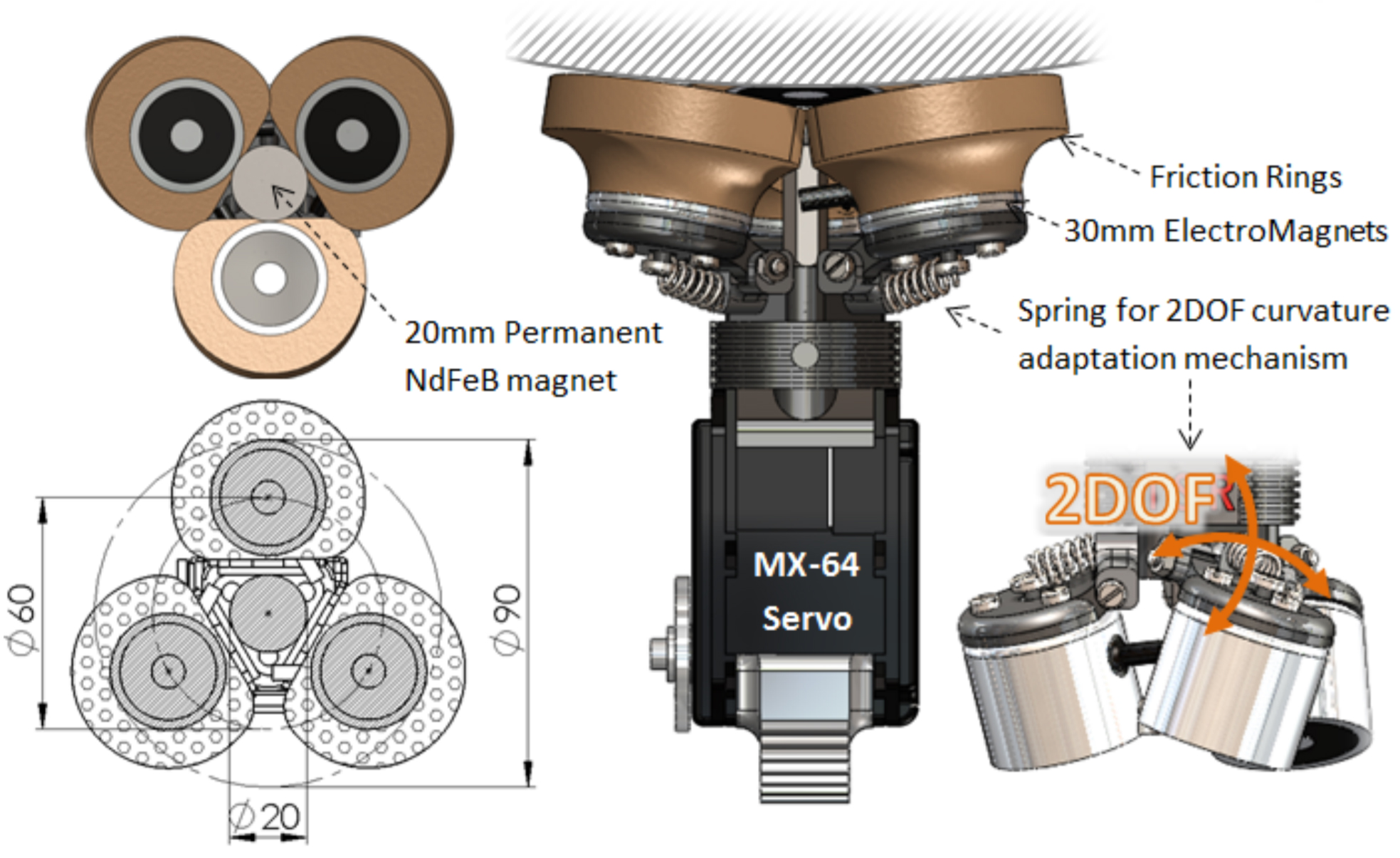
Design of the end link and magnetic attachment unit.
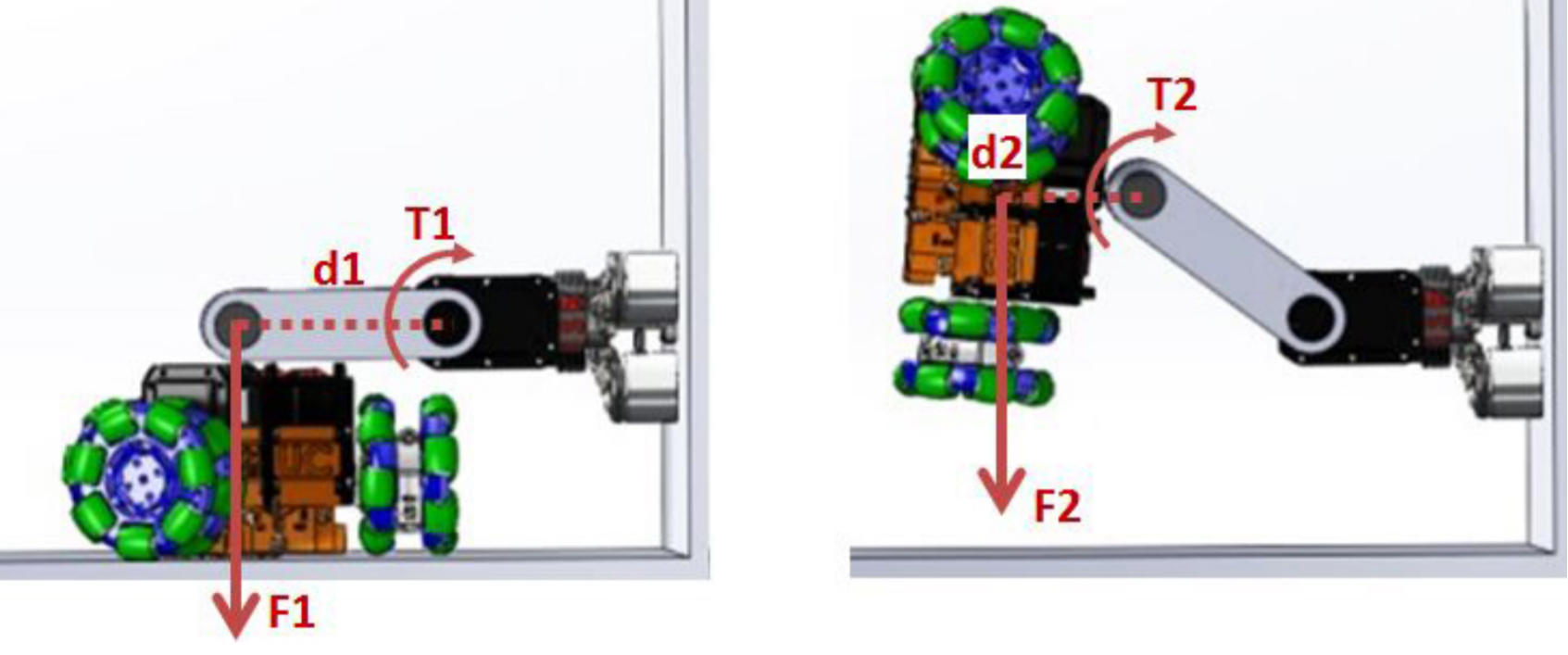
Maximum torque on joint 1 and joint 2.
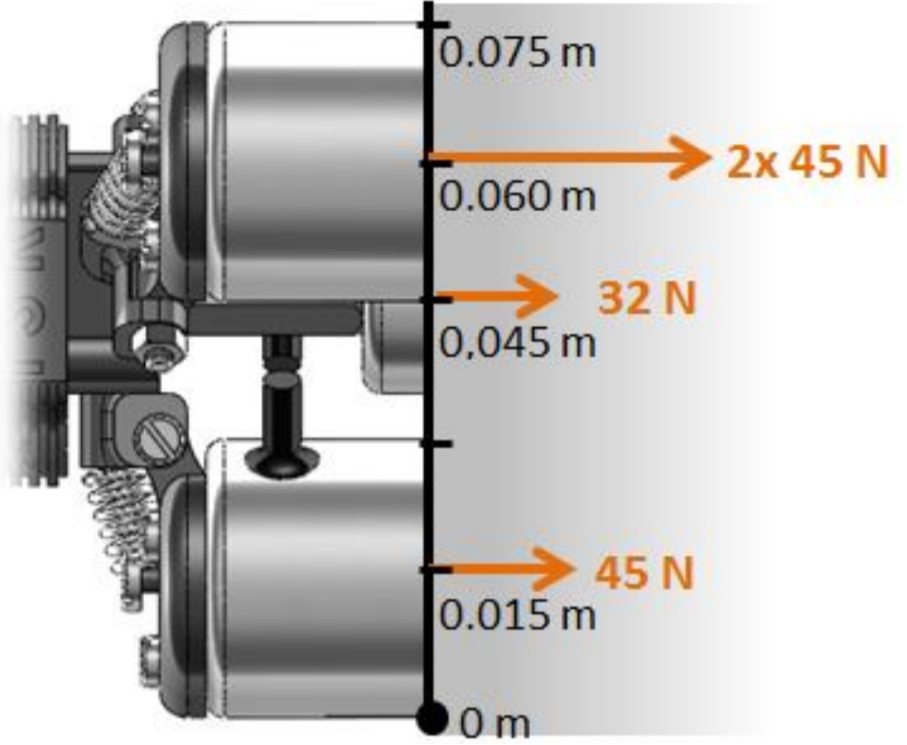
Magnetic forces on the attachment unit.

Perpendicular plane passing on pole structure. Tests with OmniClimber robot.
A single DOF arm for transition of climbing robots between perpendicular planes.
C. Viegas and M. Tavakoli, “A single DOF arm for transition of climbing robots between perpendicular planes,” 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, 2014, pp. 2867-2872. doi: 10.1109/IROS.2014.6942956