

Fabrication and Characterization of Bending and Pressure Sensors for a Soft Prosthetic Hand.
People involved:
- Mahmoud Tavakoli
- Pedro Alhais Lopes
- Anibal T de Almeida
- Carmel Majidi
We demonstrate fabrication, characterization, and implementation of “soft-matter” pressure and bending sensors for a soft robotic hand. The elastomer-based sensors are embedded in a robot finger composed of a 3D printed endoskeleton and covered by an elastomeric skin. Two types of sensors are evaluated, resistive pressure sensors and capacitive pressure sensors. The sensor is fabricated entirely out of insulating and conductive rubber, the latter composed of polydimethylsiloxane (PDMS) elastomer embedded with a percolating network of structured carbon black (CB).
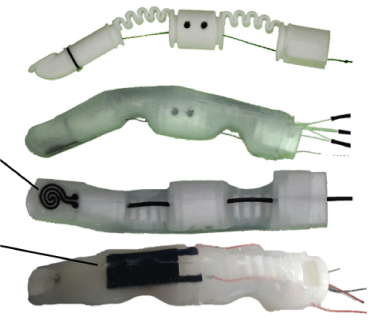
Resistive sensor mounted to the fingertips of a soft robot hand prosthetic. (C) Schematics of the resistive and capacitive sensors.
Fabrication and characterization of bending and pressure sensors for a soft prosthetic hand
Rui. Rocha et al “Fabrication and characterization of bending and pressure sensors for a soft prosthetic hand”, 2018 J. Micromech. Microeng. 28 034001